



| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

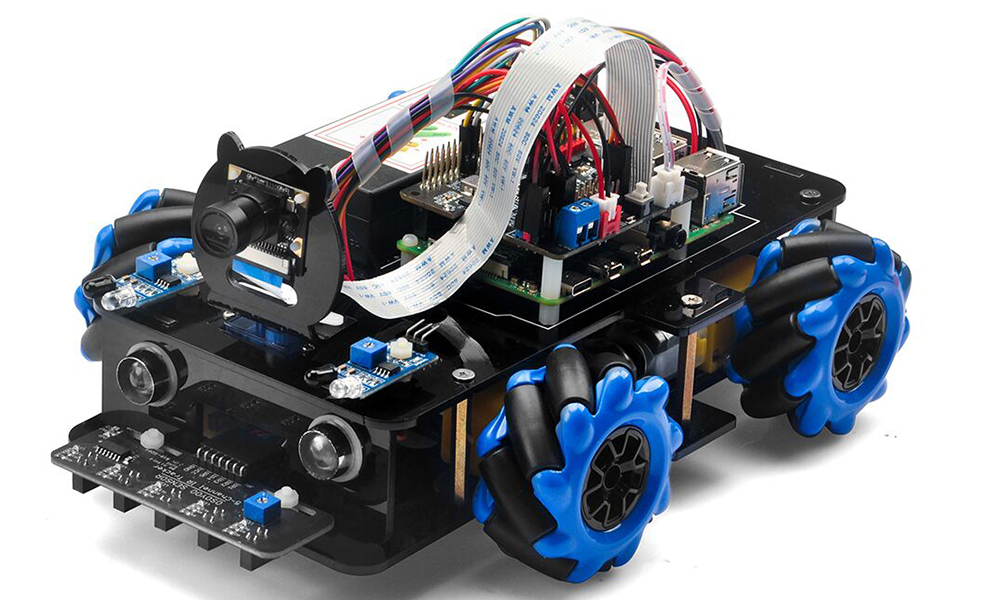
In questa lezione vi mostreremo come utilizzare Python3 Flask e il software Camera Stream per controllare un’auto robot Raspberry Pi tramite Internet. Monitorerete i movimenti in tempo reale dell’auto attraverso il suo “occhio” (la telecamera anteriore).

Componenti:
Chassis auto robotica con ruote Mecanum OSOYOO x1
Ruote e motori OSOYOO x4 (ruote sinistra x2 / ruote destra x2)
Scheda Raspberry Pi 4B
Shield OSOYOO PWM HAT x1
Scheda di controllo OSOYOO Model Y x1
Voltmetro OSOYOO x1
Telecamera CSI con cavo OSOYOO x1
Supporto telecamera OSOYOO x1
Portabatterie OSOYOO x1
Cavo jumper femmina-femmina a 3 pin OSOYOO x1
Cavi jumper femmina-femmina a 6 pin OSOYOO x2
Cavo XH2.54 femmina-femmina a 2 pin OSOYOO x1
Batterie 18650 (3,7V) x2
Caricabatterie x1

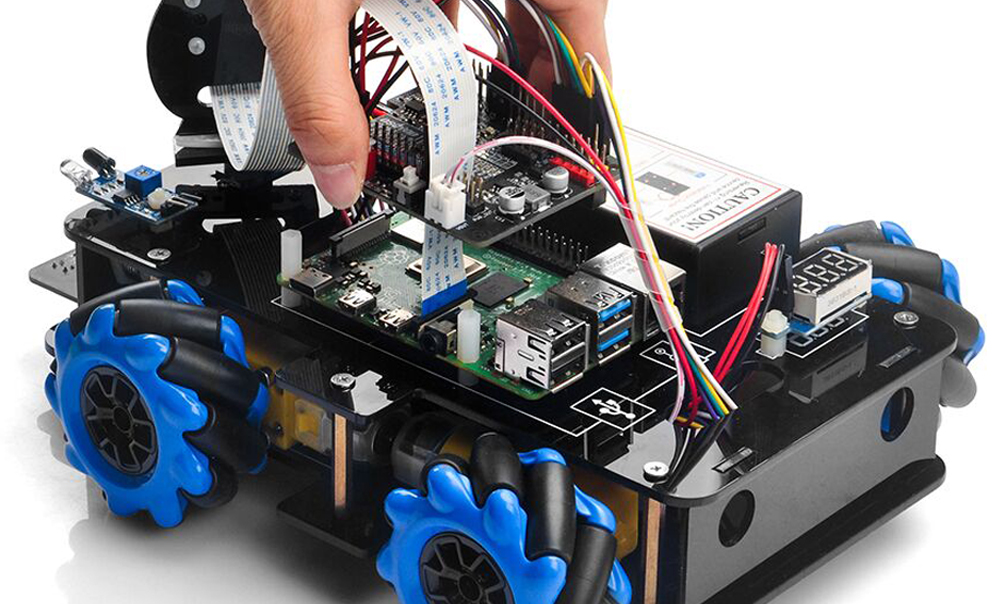
Passo 1: Completare la struttura di base della Lezione 1. Il servo deve essere installato e collegato alla porta PWM 15 (ignorare se già installato).
Passo 2: Scegliere la staffa scanalata nel servomotore, far passare il supporto della telecamera dall’alto verso il basso e fissare la lama con viti autofilettanti M1.5*6.

Passo 3: Installare la telecamera CSI sul supporto con 4 rivetti a pressione M2.
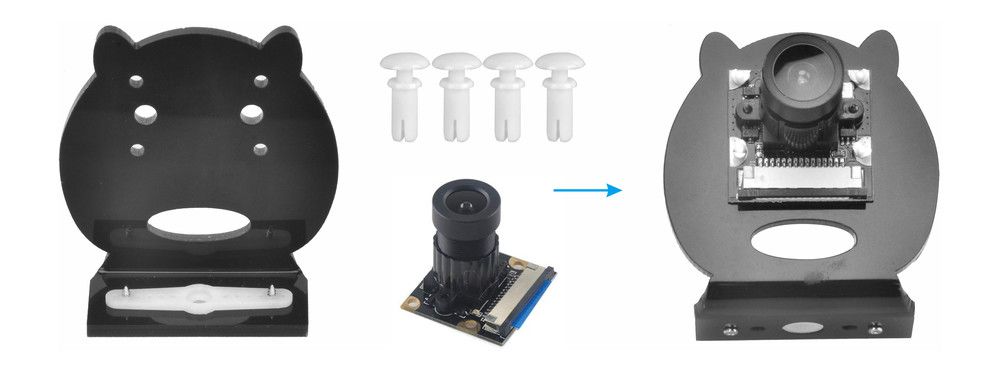
Passo 4: Collegare il cavo flat CSI alla telecamera CSI.
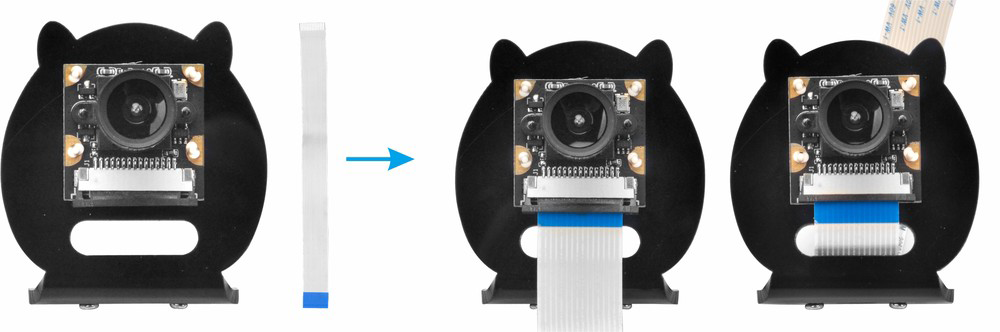
Passo 5: Montare il supporto della telecamera sul servomotore con vite autofilettante M2*4.
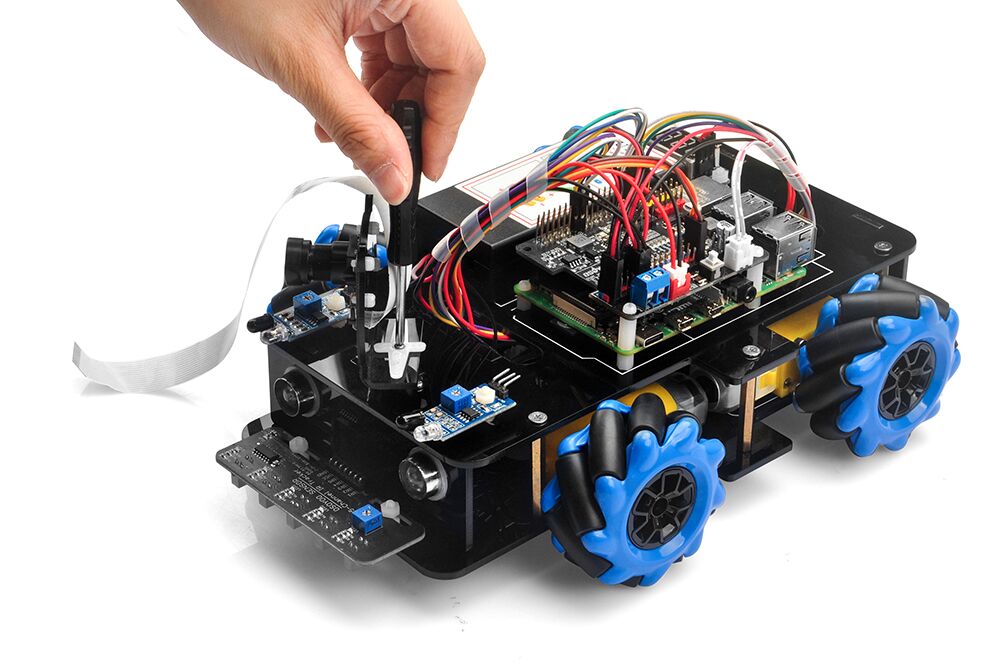
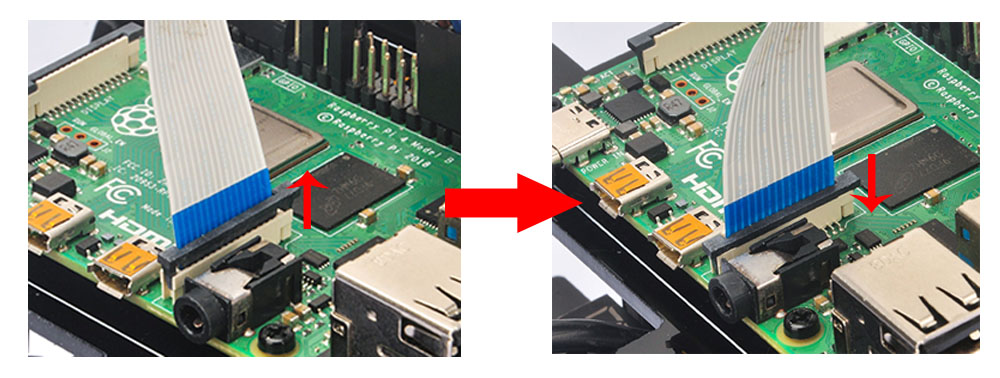
Passo 6: Collegare la telecamera CSI allo slot CSI del Raspberry Pi con il cavo flat CSI (prestare attenzione al collegamento del cavo prima dell’installazione).
Passo 7: Installare lo shield OSOYOO PWM HAT sulla scheda Raspberry Pi.

Assicurarsi di aver installato le librerie rpi.gpio e adafruit-pca9685 e di aver abilitato I2C nella Lezione 1, quindi accendere l’auto robot.
Configurazione Camera Stream:
Passo 1: Abilitare la telecamera in Raspberry Pi digitando il seguente comando (Nota: se si utilizza il sistema operativo BOOKWORM, non è necessario abilitare la telecamera):
sudo raspi-config
Selezionare → Opzioni di Interfaccia → Telecamera → No → Ok → Fine (Riavviare il Raspberry Pi secondo le indicazioni).
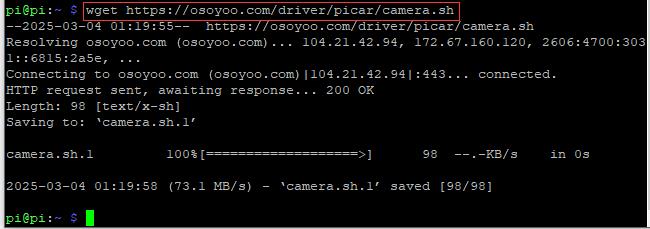
Passo 2: Digitare il seguente comando per scaricare il software Osoyoo Camera Stream:
wget https://osoyoo.com/driver/picar/camera.sh
 Passo 3: Installare il software Osoyoo Camera Stream. È un'installazione una tantum, basta digitare:
Passo 3: Installare il software Osoyoo Camera Stream. È un'installazione una tantum, basta digitare:
bash camera.sh
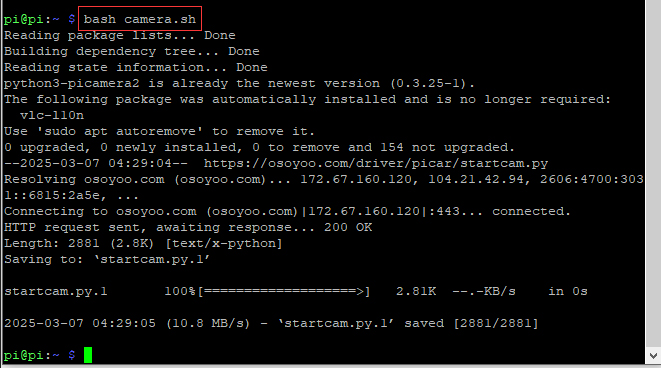
Dopo l’esecuzione, il software è installato sul Raspberry Pi. Semplicissimo!
NOTA: Il software Camera Stream va installato UNA VOLTA SOLA! Per avviarlo in futuro, seguire il Passo 4 e eseguire il file
Passo 4: Dopo l’installazione, avviare il server camera con:
python startcam.py
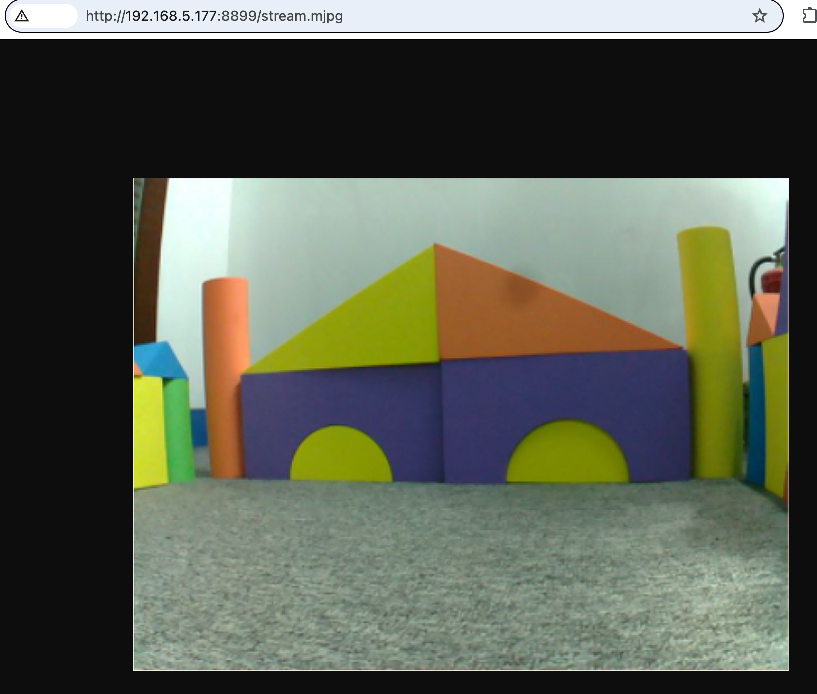
Passo 5: Testare il video di sorveglianza con il browser visitando http://your_raspberry_pi_ip:8899/stream.mjpg ((es. http://192.168.68.227:8899/stream.mjpg)
Metodo 1: Controllo via Browser
Passo 1: Aprire una nuova finestra terminale e scaricare il software:
wget https://osoyoo.com/driver/mecanum/osoyoowebcar.sh -O osoyoowebcar.sh
Passo 2: Eseguire:
bash osoyoowebcar.sh
Verrà creato automaticamente una cartella osoyoowebcar:
Passo 3: Entrare nella cartella:
cd osoyoowebcar

Passo 4: Modificare il file templates/index.html
nano templates/index.html
Passo 5: Sostituire l’indirizzo IP nella riga 34 con quello del Raspberry Pi, quindi salvare e uscire (Ctrl+X, Y, Invio).
Passo 6: Posizionare l’auto a terra ed eseguire:
sudo python ~/osoyoowebcar/webcar.py
Passo 7: Da PC o cellulare nella stessa rete Wi-Fi, visitare http://indirizzo_ip_raspberry_pi nel browser. I tasti freccia controllano la direzione, il cerchio rosso centrale ferma l’auto. In fondo ci sono quattro tasti per la velocità:
- 0 (lentissimo),
— (lento),
== (normale),
++ (massima).
- In alto, uno slider permette di ruotare la telecamera.
Metodo 2: Controllo tramite APP
Passo 1: Scaricare il codice per il controllo APP:
wget https://osoyoo.com/driver/mecanum/udpmecan5.py -O udpmecan5.py
Passo 2: Eseguire il codice (selezionare il comando appropriato per la scheda Pi):
python udpmecan5.py
Passo 3: Scaricare l’APP “OSOYOO IoT UDP Robot” da Google Play o Apple Store (o dal link diretto: https://osoyoo.com/driver/udp-app.apk)

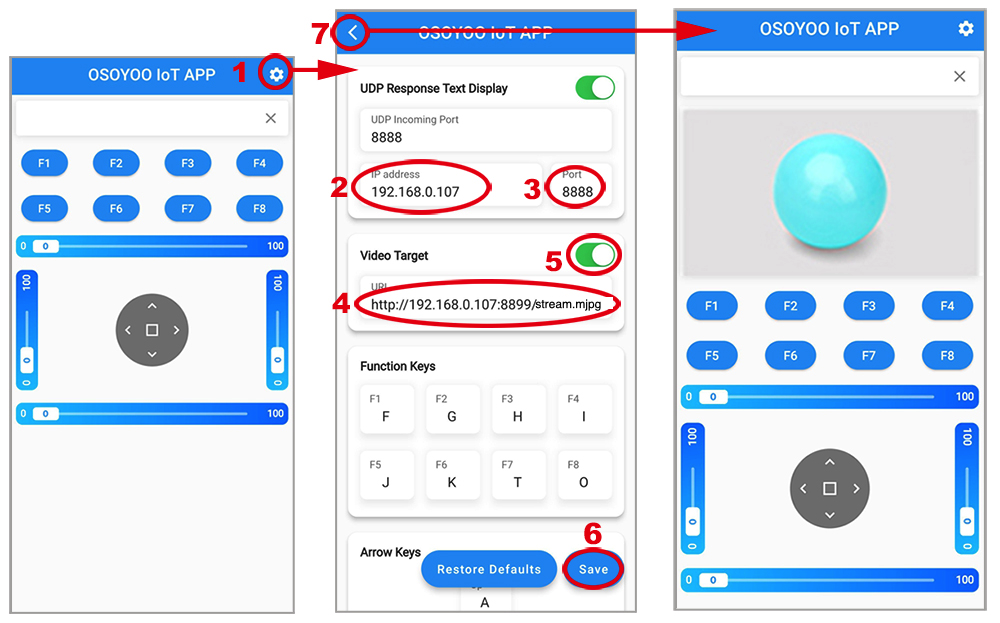
Passo 4: Collegare il telefono alla stessa rete Wi-Fi del Raspberry Pi. Aprire l’APP, cliccare l’icona delle impostazioni (1), inserire l’indirizzo IP del Raspberry Pi, Porta 8888, e in “video Target” inserire http://indirizzo_ip_raspberry_pi:8899/stream.mjpg. Attivare l’interruttore “Video Target”, salvare e tornare all’interfaccia di controllo.
Passo 5: Posizionare l’auto a terra. Utilizzare i tasti direzionali ◄ ► ▲ ▼ e lo slider in alto per muovere l’auto. Il tasto [] ferma il movimento. Lo slider in alto ruota l’auto: a sinistra gira a sinistra, a destra gira a destra. ▲ avanza, ▼ retrocede. ◄ sposta lateralmente a sinistra, ► a destra.








