| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

Dans cette leçon, nous vous montrerons comment utiliser Python3 Flask et le logiciel Camera Stream pour contrôler une voiture robot Raspberry Pi via Internet. Vous surveillerez les mouvements en temps réel de la voiture à travers son “œil” (caméra avant).

Composants :
Châssis de voiture robotique à roues Mecanum OSOYOO x1
Roues et moteurs OSOYOO x4 (roues gauche x2 / roues droite x2)
Carte Raspberry Pi 4B
Shield OSOYOO PWM HAT x1
Carte de contrôle OSOYOO Model Y x1
Voltmètre OSOYOO x1
Caméra CSI avec câble OSOYOO x1
Support de caméra OSOYOO x1
Boîtier à piles OSOYOO x1
Câble jumper femelle-femelle 3 broches OSOYOO x1
Câbles jumper femelle-femelle 6 broches OSOYOO x
Câble XH2.54 femelle-femelle 2 broches OSOYOO x1
Piles 18650 (3,7 V) x2
Chargeur de piles x1

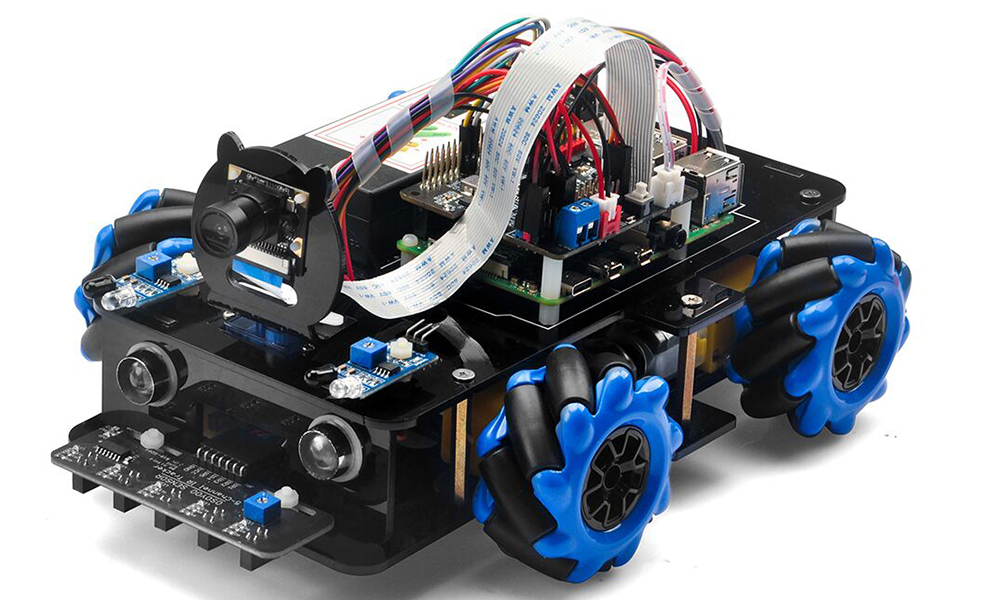
Étape 1 : Compléter la structure de base de la Leçon 1. Le servomoteur doit être installé et connecté au port PWM 15 (ignorer si déjà installé).
Étape 2 : Choisir la fixation à fente dans le servomoteur, faire passer le support de caméra de haut en bas et fixer la lame avec des vis autotaraudeuses M1,5*6.

Étape 3 : Monter la caméra CSI sur le support avec 4 rivets à pression M2.
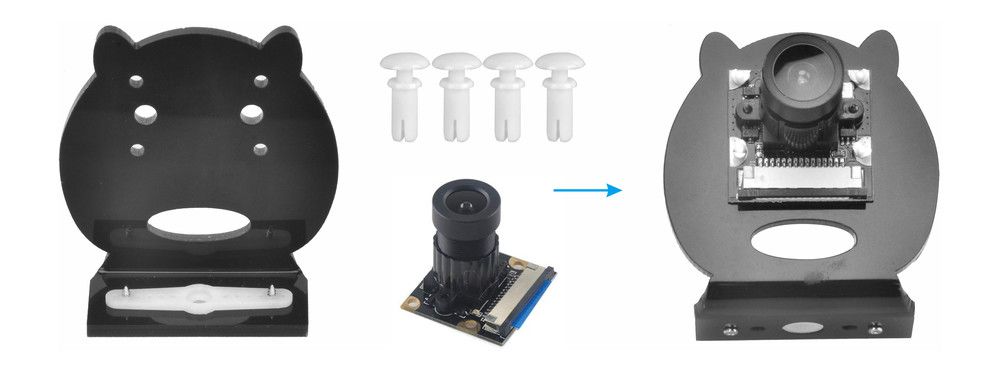
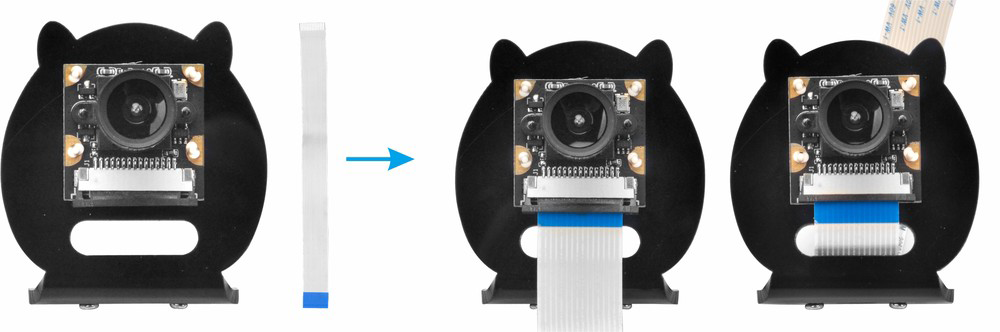
Étape 4 : Connecter le câble plat CSI à la caméra CSI.
Étape 5 : Installer le support de caméra sur le servomoteur avec une vis autotaraudeuse M2*4.
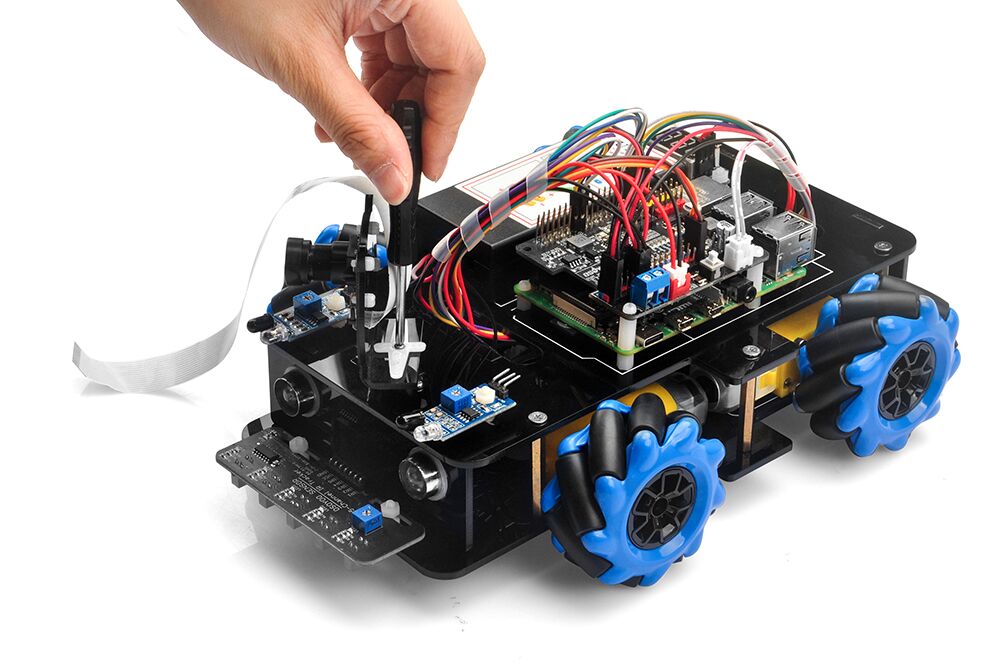
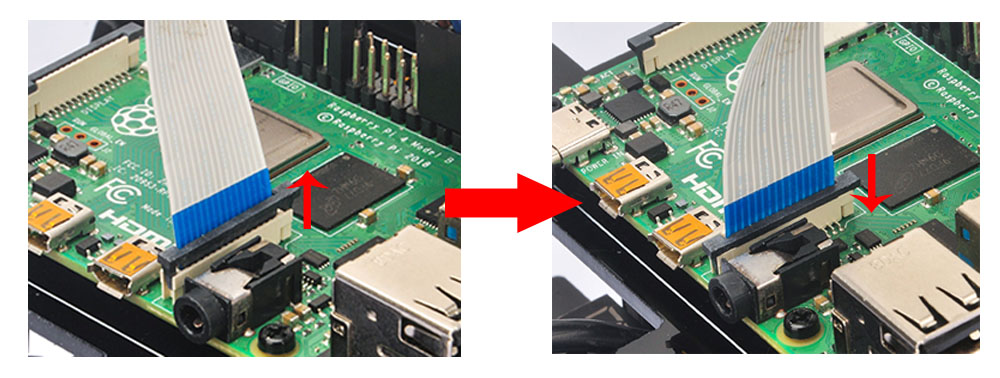
Étape 6 : Connecter la caméra CSI au port CSI du Raspberry Pi avec le câble plat CSI (faire attention à l’orientation du câble avant installation).
Étape 7 : Installer le shield OSOYOO PWM HAT sur la carte Raspberry Pi.
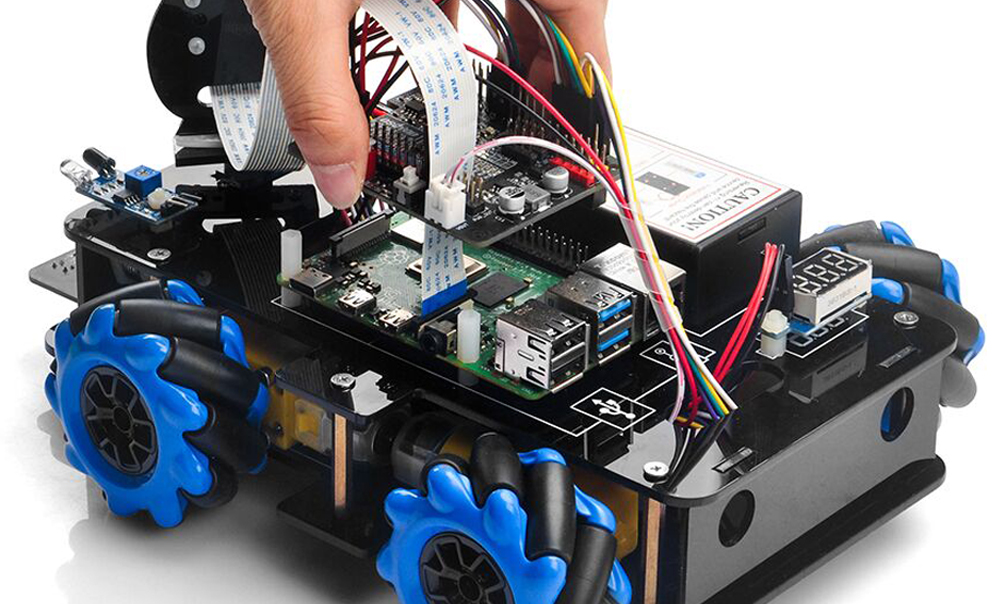

Vérifier que les bibliothèques rpi.gpio et adafruit-pca9685 sont installées et que I2C est activé dans la Leçon 1, puis allumer la voiture robot.
Configuration Camera Stream :
Étape 1 : Activer la caméra sur Raspberry Pi (Note : avec le système BOOKWORM, inutile) :
sudo raspi-config
Sélectionner → Options d’interface → Caméra → Non → Ok → Terminer (redémarrer le Raspberry Pi selon instruction).
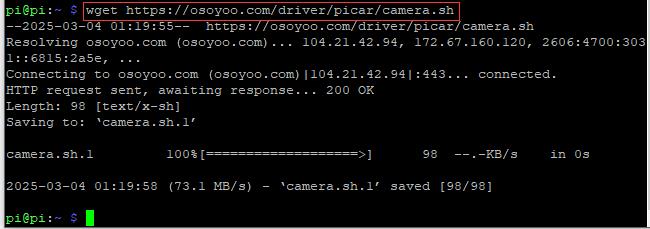
Étape 2 : Télécharger le logiciel Osoyoo Camera Stream :
wget https://osoyoo.com/driver/picar/camera.sh
 Étape 3 : Installer le logiciel (installation unique) :
Étape 3 : Installer le logiciel (installation unique) :
bash camera.sh
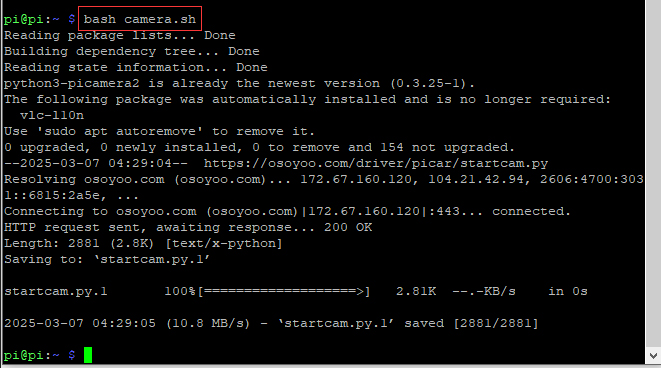
Après exécution, le logiciel est installé. Très simple !
NOTE : Le logiciel Camera Stream ne s’installe QU’UNE FOIS ! Pour le lancer plus tard, suivre l’Étape 4 et exécuter python startcam.py.
Étape 4 : Démarrer le serveur caméra avec :
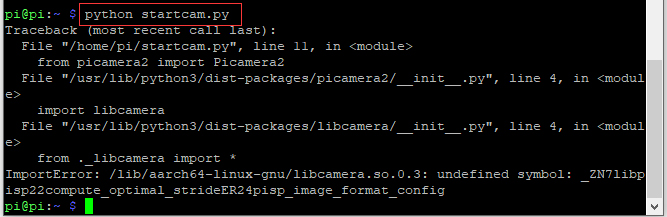
python startcam.py
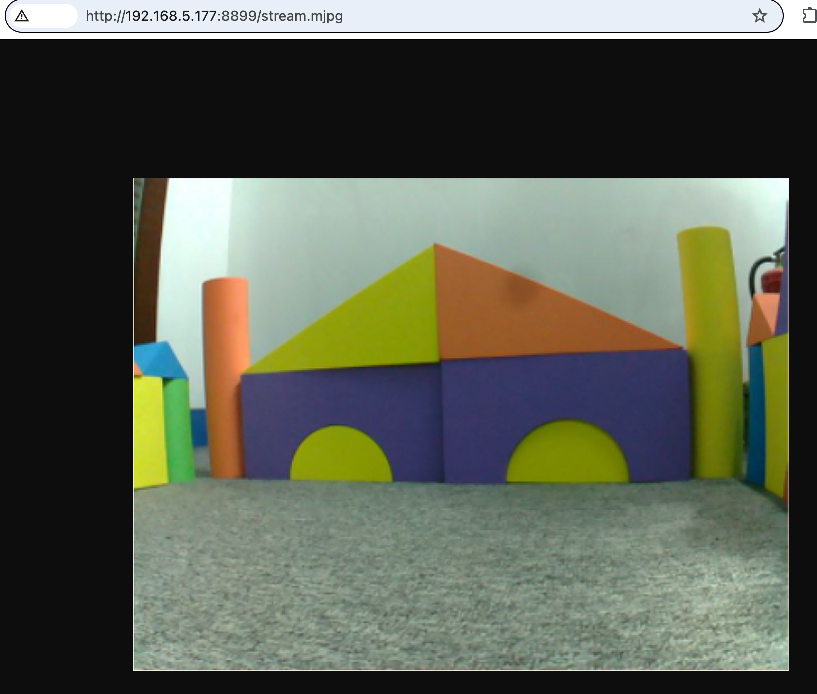
Étape 5 : Tester la vidéo de surveillance dans le navigateur à l’adresse http://adresse_ip_raspberry_pi:8899/stream.mjpg (ex. http://192.168.68.227:8899/stream.mjpg).
Méthode 1 : Contrôle via Navigateur
Étape 1 : Ouvrir une nouvelle fenêtre terminal et télécharger le logiciel :
wget https://osoyoo.com/driver/mecanum/osoyoowebcar.sh -O osoyoowebcar.sh
Étape 2 : Exécuter :
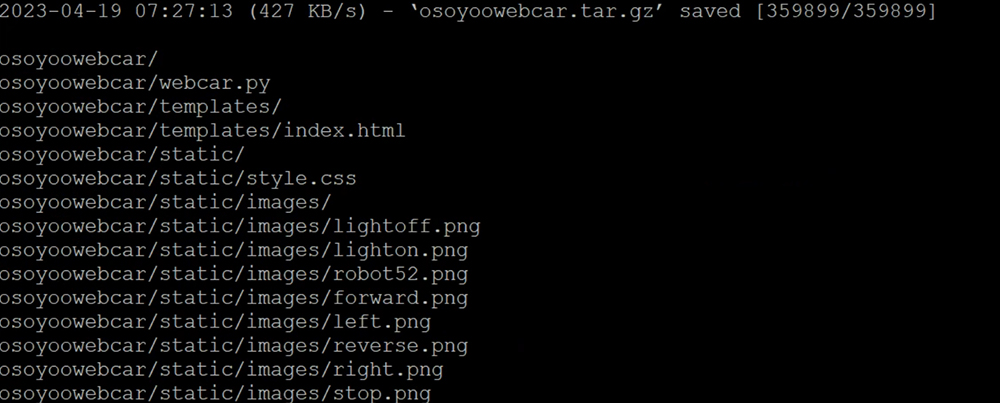
bash osoyoowebcar.sh
Un dossier osoyoowebcar sera créé automatiquement.
Étape 3 : Accéder au dossier :
cd osoyoowebcar

Étape 4 : Modifier le fichier :
nano templates/index.html
Étape 5 : Remplacer l’adresse IP ligne 34 par celle du Raspberry Pi, sauvegarder et quitter (Ctrl+X, Y, Entrée).
Étape 6 : Placer la voiture au sol et exécuter :
sudo python ~/osoyoowebcar/webcar.py
Étape 7 : Depuis un PC ou téléphone sur le même Wi-Fi, visiter http://adresse_ip_raspberry_pi dans le navigateur. Les flèches contrôlent la direction, le cercle rouge central arrête la voiture. Quatre boutons de vitesse en bas :
0 (très lent),
— (lent),
== (normal),
++ (rapide).
Un curseur en haut permet d’orienter la caméra.
Méthode 2 : Contrôle par APP
Étape 1 : Télécharger le code pour contrôle APP :
wget https://osoyoo.com/driver/mecanum/udpmecan5.py -O udpmecan5.py
Étape 2 : Exécuter le code (choisir la commande adaptée à la carte Pi) :
python udpmecan5.py
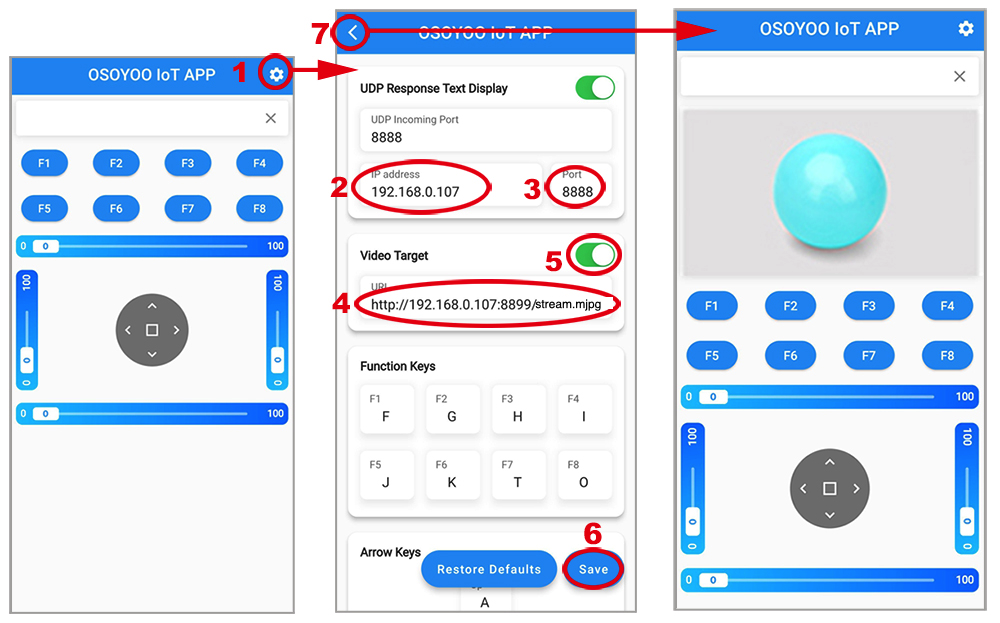
Étape 4 : Connecter le téléphone au même Wi-Fi que le Raspberry Pi. Ouvrir l’APP, cliquer sur l’icône paramètres (1), entrer l’adresse IP du Raspberry Pi, Port 8888, et dans “Video Target” entrer http://adresse_ip_raspberry_pi:8899/stream.mjpg. Activer l’interrupteur “Video Target”, sauvegarder et revenir à l’interface de contrôle.
Étape 5 : Placer la voiture au sol. Utiliser les touches directionnelles ◄ ► ▲ ▼ et le curseur du haut pour déplacer la voiture. La touche [] arrête le mouvement. Le curseur au-dessus des touches tourne la voiture : à gauche pour tourner à gauche, à droite pour tourner à droite. ▲ avance, ▼ recule. ◄ déplacement latéral gauche, ► déplacement latéral droit.