Note : Tous les produits OSOYOO pour Arduino sont des cartes tierces qui sont entièrement compatibles avec Arduino.
Revendeurs en ligne agréés
Où acheter le set de batteries 18650 et le chargeur USB
Acheter aux OSOYOO
Acheter aux US
Acheter aux UK
Acheter aux DE
Acheter aux IT
Acheter aux FR
Acheter aux ES
Acheter aux JP
Où acheter le set de boîtiers pour piles 9V et 18650
Acheter aux OSOYOO
Acheter aux US
Acheter aux UK
Acheter aux DE
Acheter aux IT
Acheter aux FR
Acheter aux ES
Acheter aux JP
Objectif:
Dans ce projet, nous allons connecter la voiture robot au WIFI et utiliser une application pour contrôler la voiture via Internet. Il s’agit d’une application typique de l’Internet des objets (IoT).
Vous devez avoir terminéla leçon 5 avant de poursuivre cette leçon.
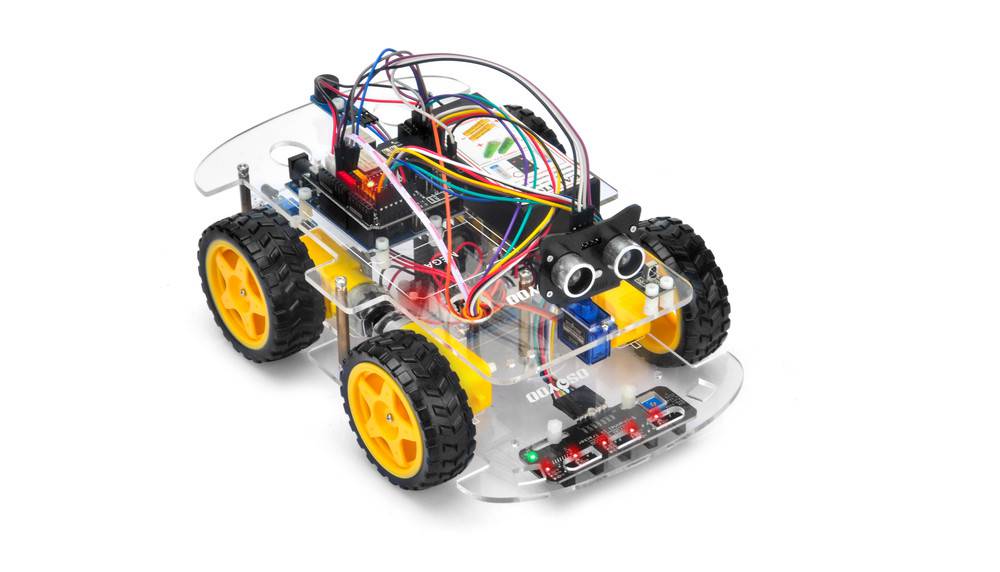
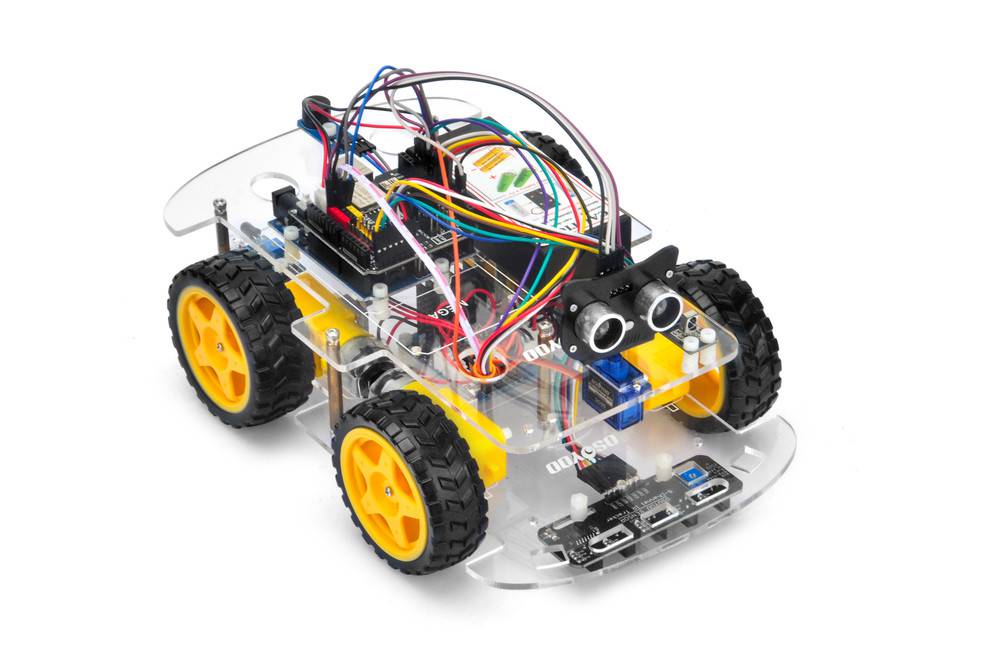
Étape 1: Installez le cadre de base de la voiture intelligente conformément à la leçon 5. Si vous n’installez pas le module de capteur de suivi, veuillez compléter l’installation dans la leçon 4.
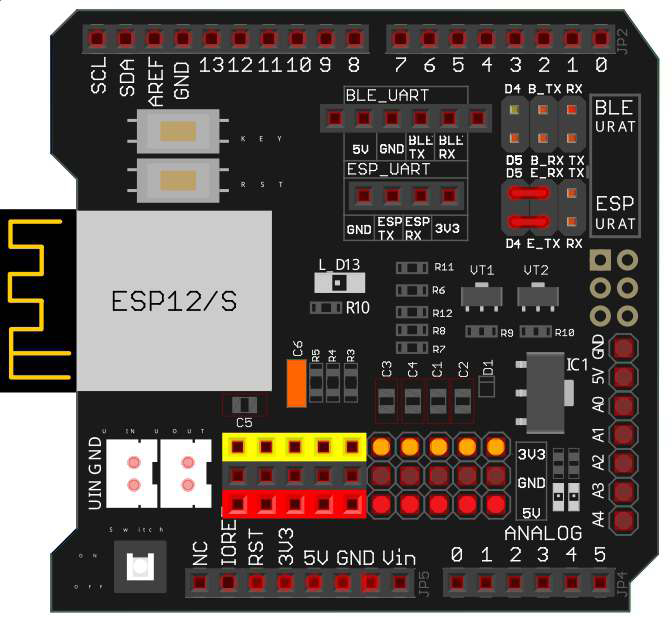
Étape 2: Connectez la broche E_TX (Esp8266 TX) à D4 (soft serial RX pour UNO) et la broche E_RX (ESP8266_RX) à D5 (software serial TX pour UNO) comme indiqué sur l’image suivante.
(Remarque: Notre shield OSOYOO Uart WiFi V1.3 connecte les ports BLE URAT TX/RX à D4,D5 avec des cavaliers par défaut. Si vous trouvez que les ports BLE URAT TX/RX sont connectés, vous devez enlever ces cavaliers et changer pour connecter ESP URAT E-TX à D4 et E-RX à D5)
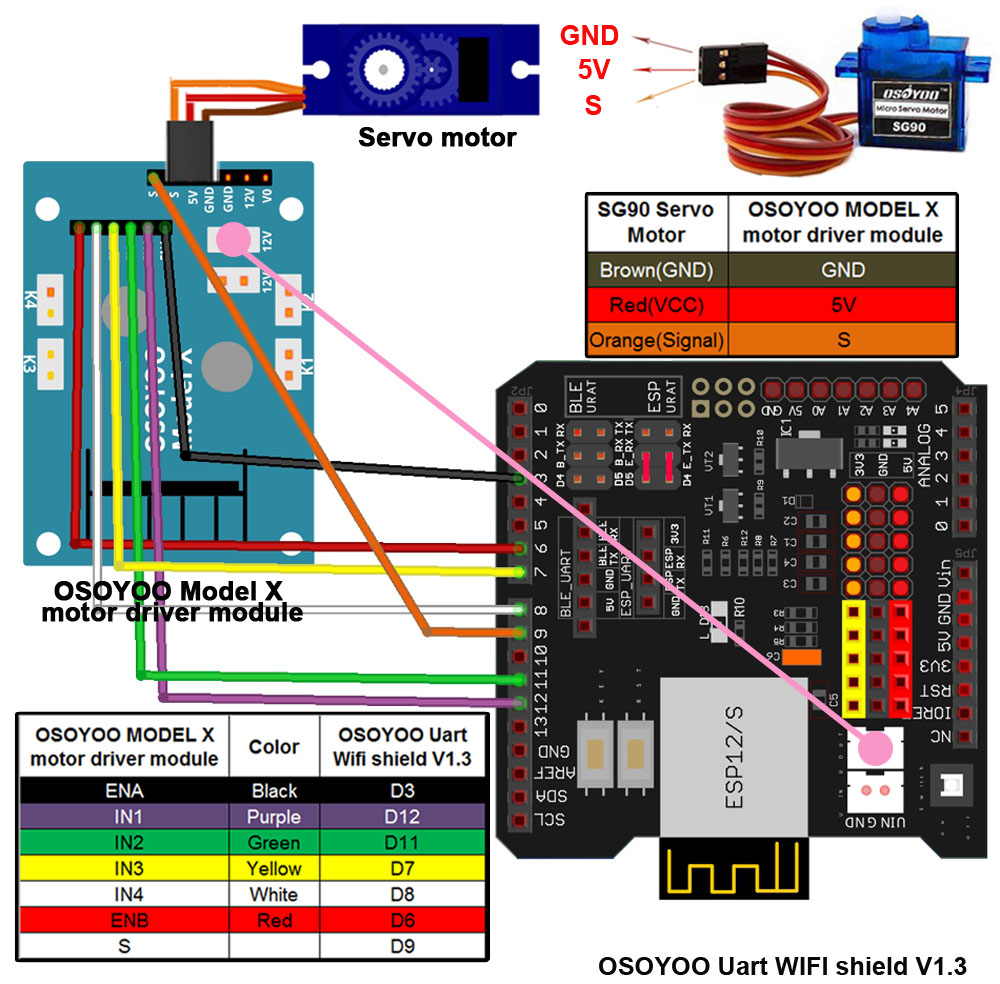
Étape 3: Connectez le servomoteur SG90, le module de pilotage de moteur OSOYOO MODEL X et le bouclier OSOYOO Uart WiFi V1.3 comme indiqué sur le graphique suivant (si vous avez terminé le câblage dans la leçon 5, sautez cette étape):
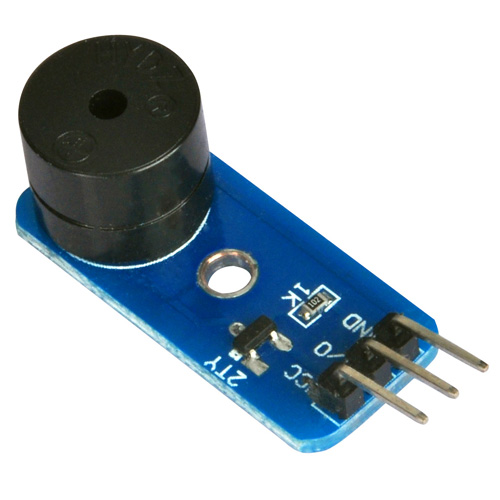
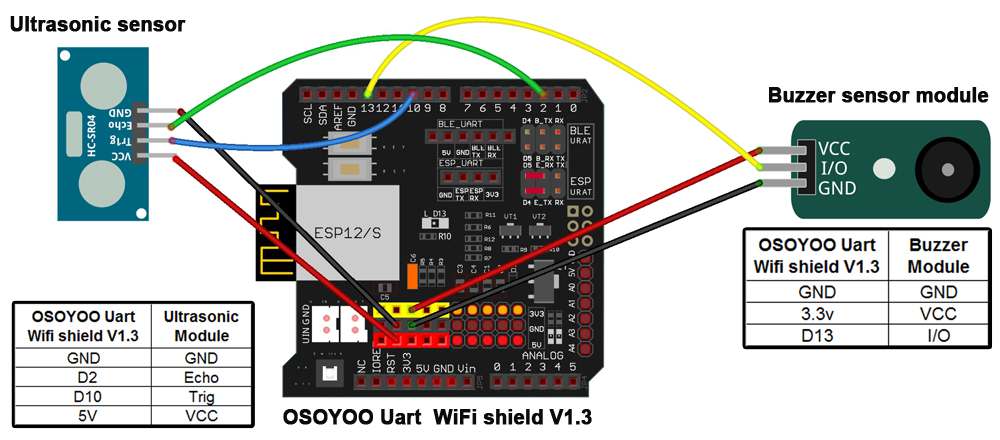
Étape 4: Connecter le module ultrasonique, le module buzzer avec le bouclier OSOYOO Uart WiFi V1.3 selon le diagramme de connexion ci-dessous (Si vous avez terminé les câbles dans la leçon 5, veuillez sauter cette étape)
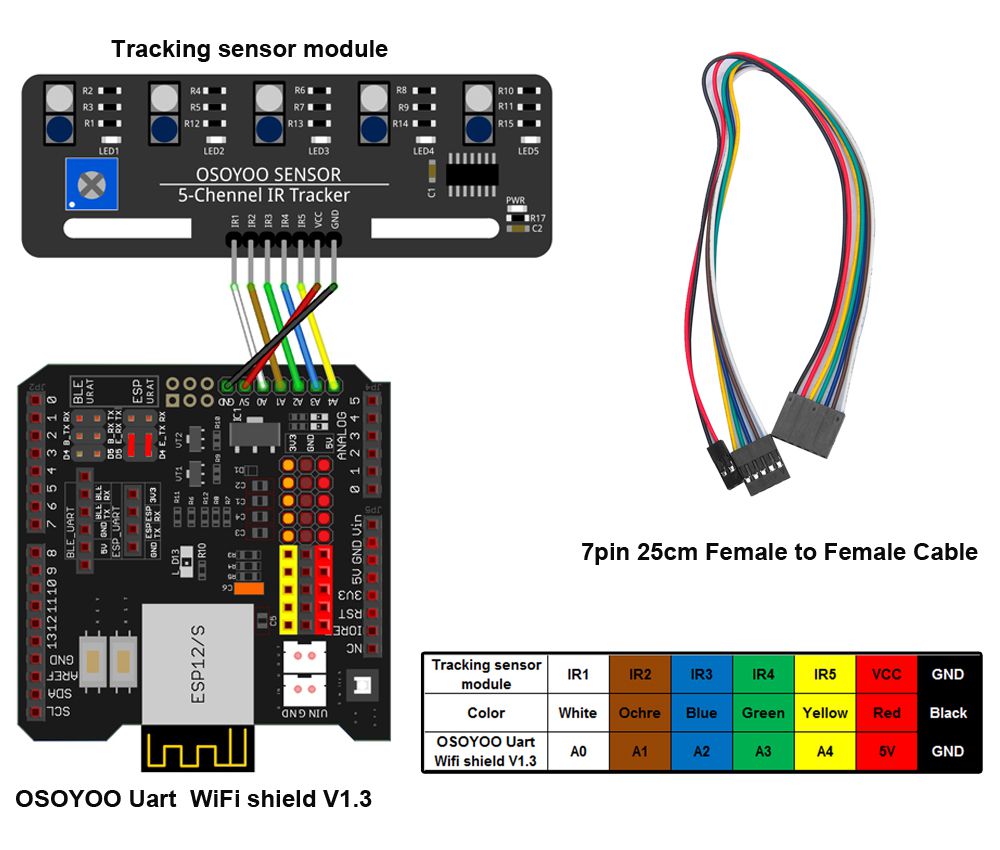
Étape 5: Connectez le module du capteur de suivi avec le bouclier OSOYOO Uart WiFi V1.3 comme indiqué dans le diagramme de connexion ci-dessous (si vous avez terminé les câbles dans la leçon 4, sautez cette étape)
Note:
1)N’oubliez pas d’ajuster la sensibilité des modules de capteurs de suivi comme suit selon le lien leçon 4 2)N’oubliez pas de procéder à l’alignement de la direction du capteur ultrasonique comme indiqué selon le lien leçon 5
rechercher “Osoyoo WIFI UDP Robot APP” dans
Google Play ou Apple Store
(Note : Si vous ne trouvez pas cette APP dans Google Play,
vous pouvez directement télécharger l’APP à partir du lien suivant : https://osoyoo.com/driver/udp-app.apk)
Étape 1) Télécharger OSOYOO WIFI UDP Robot Car control APP
Dans Google Play ou Apple Store, recherchez les mots clés “OSOYOO WIFI UDP Robot Car”, vous trouverez une icône orange APP comme suit(Note : Si vous ne trouvez pas cette APP dans Google Play, vous pouvez directement télécharger l’APP à partir du lien suivant : https://osoyoo.com/driver/udp-app.apk):
Étape 2) Veuillez télécharger le fichier zip de la bibliothèque à partir de WiFiEsp-master .Ouverture de l’IDE ->clic sur Sketch ->Inclure la bibliothèque -> Add .ZIP library, puis charger le fichier zip ci-dessus dans l’esquisse..
Étape 3) Code de l’esquisse Installation:
La voiture robot Osoyoo V2 peut fonctionner en deux modes WIFI : Le mode STA et le mode AP. Les schémas de ces deux modes sont différents. Expliquons ces deux modes un par un
A)Mode STA En mode STA, la voiture robot V2.1 sera un dispositif client de votre routeur LAN. Vous devez enregistrer le nom SSID et le mot de passe de votre routeur LAN dans le sketch.
Une fois le sketch lancé, le service DHCP de votre routeur attribuera une adresse IP à votre voiture robot et votre APP utilisera cette adresse IP pour accéder à votre voiture.
1) Veuillez télécharger le code d’esquisse du mode STA à partir de v2smartcar-lesson6A . Décompressez le fichier, vous verrez un dossier “v2smartcar-lesson6A”. ouvrez l’IDE -> cliquez sur file -> cliquez sur Open -> choisissez le code “smartcar-lesson6A.ino” dans le dossier smartcar-lesson6A, chargez le code dans votre carte
2) Vous devez modifier le code :
char ssid[] = “YOUR_ROUTER_SSID”; // remplacer par le SSID wifi de votre routeur
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; // remplacer par votre mot de passe wifi
3) Téléchargez le sketch sur votre carte. Enfin, cliquez sur la fenêtre Serial monitor dans le coin supérieur droit de l’IDE, vous verrez le résultat suivant:
4) Dans ce mode, vous verrez une adresse IP qui est l’adresse IP de notre réseau local assignée par mon routeur. Notez cette adresse IP et cliquez sur Setting pour configurer l’adresse IP du robot. Définissez cette adresse IP dans la section APP Setting et le Port à 8888 dans les paramètres.
B)Mode AP
Parfois, nous ne disposons pas d’un réseau local ou d’un routeur WIFI. Pour contrôler la voiture, nous devons utiliser le mode AP.
Lorsqu’elle fonctionne en mode AP, notre voiture robot devient elle-même un point d’accès WIFI. Notre téléphone portable peut se connecter à la voiture robot en tant que client wifi. L’adresse IP du robot est fixée à 192.168.4.1 et il n’est pas connecté au WAN.
1) Veuillez télécharger l’esquisse à partir du lien suivant: v2smartcar-lesson6B. Dézippez le fichier, vous verrez un dossier “v2smartcar-lesson6B”. ouvrez l’IDE -> cliquez sur file -> cliquez sur Open -> choisissez le code “smartcar-lesson6B.ino” dans le dossier smartcar-lesson6B, chargez le code dans votre carte
2) Ouvrez le moniteur série, et vous verrez un résultat similaire au mode STA. Un nouveau SSID WIFI “osoyoo_robot” avec l’adresse IP 192.168.4.1 apparaîtra dans la fenêtre. Cela signifie que votre voiture robot a un Hot Spot WIFI nommé “osoyoo_robot”, son adresse IP est 192.168.4.1.
3) Connect your cell phone to “osoyoo_robot” wifi hot_spot, and Réglez l’adresse IP sur “192.168.4.1” et le port sur 8888 dans la section Paramètres APP.
Maintenant votre voiture robot devient un Hot Spot WIFI, vous pouvez utiliser votre téléphone portable pour contrôler la voiture robot.
Final Testing:
Mettez la voiture en marche. Cliquez maintenant sur Setting pour configurer l’adresse IP du robot.
A) En mode STA, vous devez connecter votre téléphone portable au même réseau local que votre voiture robot et définir une adresse IP identique à l’adresse IP du robot affichée dans Serial Monitor.
B) En mode AP, vous devez connecter votre téléphone portable au hot_spot wifi “osoyoo_robot” et définir l’adresse IP comme 192.168.4.1.
vous pouvez cliquer sur les touches de direction ◄ ► ▲ ▼ pour faire avancer la voiture. Utilisez la touche || pause pour arrêter le mouvement de la voiture.
Si vous cliquez sur la touche F8, la voiture effectuera une conduite automatique d’évitement des obstacles, comme dans la leçon 5
Si vous cliquez sur la touche F7, la voiture effectuera une conduite automatique avec suivi des liens, comme dans la leçon 4
Remarque: F1~F6 sont des fonctions qui seront développées ultérieurement.
FAQ sur l’APP WIFI UDP et le code d’esquisse:
Q1)Comment régler la vitesse de la voiture du robot? A: Si vous souhaitez modifier la vitesse de la voiture robot, veuillez suivre les paramètres suivants dans les lignes 11 à 13:
SPEED valeur détermine la vitesse de déplacement vers l’avant
TURN_SPEED valeur détermine la vitesse de rotation
SHIFT_SPEED valeur détermine la vitesse de déplacement parallèle
Q 2)Que se passe-t-il lorsque vous appuyez sur des boutons dans OSOYOO WiFi UDP Robot Car APP ? A: Lorsque vous appuyez sur un bouton de l’APP, celle-ci envoie un message d’une seule lettre via le protocole UDP à l’appareil cible (dans cet exemple, notre bouclier WIFI).
Bouton
Message UDP
F1
F
F2
G
F3
H
F4
I
F5
J
F6
K
▲
A
▼
B
►
R
◄
L
square
E
F7
O
F8
T
Q3)Comment la carte gère-t-elle la commande UDP?
Les instructions switch(c) suivantes dans le fichier sketch v2smartcar-lesson6 gèrent la commande UDP
switch (c) //serial control instructions
{
case 'A':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_ADVANCE; WorkMode="GO_ADVANCE";break;
case 'L':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_LEFT; WorkMode="GO_LEFT";break;
case 'R':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_RIGHT;WorkMode="GO_RIGHT";break;
case 'B':Drive_Status=MANUAL_DRIVE; Drive_Num=GO_BACK;WorkMode="GO_BACK";break;
case 'E':Drive_Status=MANUAL_DRIVE; Drive_Num=STOP_STOP;WorkMode="STOP_STOP";break;
case 'O':Drive_Status=AUTO_DRIVE_UO;Serial.println("go OBSTACLE");WorkMode="OBSTACLE";break;
case 'T':Drive_Status=AUTO_DRIVE_LF;WorkMode="line follow";break;
case 'G':track_speed=track_speed+10;
if(track_speed>200) track_speed=200
;break;
case 'J':track_speed=track_speed-10;
if(track_speed<80) track_speed=80
;break;
default:break;
} //END OF ACTION SWITCH
Dans le code ci-dessus, c dans les crochets de switch() est la donnée UDP envoyée par le téléphone portable APP. Une fois que la touche APP ▲ est pressée, la ligne case ‘A’ … la ligne traitera la commande et fera avancer la voiture.
I am trying to use the first version of the WIFI code (STA Mode). I got the code to compile and load into the robot, however, I am getting an error stating -Cannot initialize ESP module, WIFI Shield is not present.
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
3. Please confirm that the voltage is more than 7.2V.
Still waiting on answer to my question for Lesson 5. So now I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module”
“WiFi ESP TIMEOUT” “cannot initialize ESP module” “WiFi Shield not present” . I have checked the router but it does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module, W[WiFiESP] Initilization successful, W[WiFiESP] Attempting to connect to [ssid] , w[WiFiESP] failed connecting to [ssid]. etc ——-
The router does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
based on your description, you are very very very very likely to have written wrong SSID or PASSWORD in the sketch code. Please double check every letter of your SSID and password in the code include space and everything. Also make sure your robot car is connecting to a wifi router, not to a cell phone hotspot. Cell phone hotspot might block ESP8266 as STA client.
Hi,
You were correct I had missed out one of the letters in the password. The print is so small my old eyes are not so good for that.
Many thanks for your help.
Regards, Jim.
when I try to sketch lesson 6 I get the following error message
C:\Users\Steve\Desktop\v2smartcar-lesson6A\v2smartcar-lesson6A.ino:11:10: fatal error: WiFiEspUdp.h: No such file or directory
#include
^~~~~~~~~~~~~~
compilation terminated.
exit status 1
Compilation error: WiFiEspUdp.h: No such file or directory
Did I miss something?
I redownloaded the first set and sketched it now I’m getting
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] Cannot initialize ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] No tag found
WiFi shield not present
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
You need change the code Line 96 and Line 98 :
char ssid[] = “YOUR_ROUTER_SSID”; // replace this with your router wifi SSID
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; // replace with your wifi password
3. Please confirm that the voltage is more than 7.2V.
I have uploaded this sketch ok. However how can I see the debug output in the Serial Monitor ?
When connected via a USB cable the serial monitor shows output. However, as soon as the car is untethered the connection is lost.
When connected the monitor say to open a browser window, which is where I assume I will see the monitor, however, the browser does not find a page at the location stated.
9:48:21.699 -> [WiFiEsp] Initializing ESP module
09:48:26.458 -> [WiFiEsp] Initilization successful – 1.5.4
09:48:26.525 -> Attempting to connect to WPA SSID: BT-XXXXXX
09:48:31.543 -> [WiFiEsp] Connected to BT-XXXXX
09:48:31.607 -> You’re connected to the network
09:48:31.642 ->
09:48:31.642 -> IP Address: 192.168.1.220
09:48:31.677 ->
09:48:31.677 -> To see this page in action, connect to BT-6MA89Q and open a browser to http://192.168.1.220
09:48:31.772 ->
09:48:31.772 -> Listening on port 8888
I’m running into the same problem that many others seem to have hit. I can’t get the wifi module to connect at all. I’ve swapped two different UNOs, two different Mega2560s, and all the wiring I can. I have the Arduino powered from a 12V wall wart (I had everything on the robot, but pulled it apart to make sure that wasn’t the issue).
The code stops running after the WiFi.init call returns with a WL_NO_SHIELD value, so this isn’t an issue with the network settings. I’ve even tried the network scanner example from the wifi library to see if that might be an issue.
On the UNO I leave the jumpers in place across D4/E_TX and D5/E_RX. On the 2560 I’ve various pairings of E_RX/D1[89] and E_TX/D1[89]. I’m stuck here. Do I have a bad board or is there more testing I can do?
Ok, got thru the first part. The shield starts out at 115200bps and without that there’s no communication. Now I can get the shield connected to my local wifi. But, the part that says connect a browser to http://addr:8888 doesn’t work. Shouldn’t the shield be using TCP here? I can see the device on my local network.
11:30:34:179 -> [WiFiEsp] Connected to xxxxx
11:30:34:215 -> You’re connected to the network
11:30:34:251 ->
11:30:34:251 -> IP Address: 192.168.54.36
11:30:34:280 -> 3C:E9:0E:E5:4D:44
11:30:34:301 ->
11:30:34:301 -> To see this page in action, connect to xxxxx and open a browser to http://192.168.54.36:8888
11:30:34:407 -> Listening on port 8888































I am trying to use the first version of the WIFI code (STA Mode). I got the code to compile and load into the robot, however, I am getting an error stating -Cannot initialize ESP module, WIFI Shield is not present.
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
3. Please confirm that the voltage is more than 7.2V.
Still waiting on answer to my question for Lesson 5. So now I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module”
“WiFi ESP TIMEOUT” “cannot initialize ESP module” “WiFi Shield not present” . I have checked the router but it does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
I have moved on to Lesson 6A. All connections made and sketch installed in board. I have entered my router ssid and password into sketch. I have chosen STA mode. When I open the serial monitor I get the following message. “W[WIFIESP} Initializing ESP Module, W[WiFiESP] Initilization successful, W[WiFiESP] Attempting to connect to [ssid] , w[WiFiESP] failed connecting to [ssid]. etc ——-
The router does not show the Shield as a connected device. Can you help? I have both 5G and 2.4G available.
Regards, Jim Robb
I refer to my question of December 13th at 9.16pm. Have you any suggestions why my Shield will not connect to my WiFi ESP?
Regards, Jim Robb
hi, James Robb,
based on your description, you are very very very very likely to have written wrong SSID or PASSWORD in the sketch code. Please double check every letter of your SSID and password in the code include space and everything. Also make sure your robot car is connecting to a wifi router, not to a cell phone hotspot. Cell phone hotspot might block ESP8266 as STA client.
Hi,
You were correct I had missed out one of the letters in the password. The print is so small my old eyes are not so good for that.
Many thanks for your help.
Regards, Jim.
when I try to sketch lesson 6 I get the following error message
C:\Users\Steve\Desktop\v2smartcar-lesson6A\v2smartcar-lesson6A.ino:11:10: fatal error: WiFiEspUdp.h: No such file or directory
#include
^~~~~~~~~~~~~~
compilation terminated.
exit status 1
Compilation error: WiFiEspUdp.h: No such file or directory
Did I miss something?
I redownloaded the first set and sketched it now I’m getting
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] Cannot initialize ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] No tag found
WiFi shield not present
1. Please confirm that connect E_TX (Esp8266 TX) pin to Arduino D4(UNO soft serial RX) and E_RX(ESP8266_RX) pin to D5(UNO software serial TX) as the step 2 in the installation
2. Please check that you change the ssid and psw to your own before uploading the code.
You need change the code Line 96 and Line 98 :
char ssid[] = “YOUR_ROUTER_SSID”; // replace this with your router wifi SSID
char pass[] = “YOUR_ROUTER_WIFI_PASSWORD”; // replace with your wifi password
3. Please confirm that the voltage is more than 7.2V.
I have uploaded this sketch ok. However how can I see the debug output in the Serial Monitor ?
When connected via a USB cable the serial monitor shows output. However, as soon as the car is untethered the connection is lost.
When connected the monitor say to open a browser window, which is where I assume I will see the monitor, however, the browser does not find a page at the location stated.
9:48:21.699 -> [WiFiEsp] Initializing ESP module
09:48:26.458 -> [WiFiEsp] Initilization successful – 1.5.4
09:48:26.525 -> Attempting to connect to WPA SSID: BT-XXXXXX
09:48:31.543 -> [WiFiEsp] Connected to BT-XXXXX
09:48:31.607 -> You’re connected to the network
09:48:31.642 ->
09:48:31.642 -> IP Address: 192.168.1.220
09:48:31.677 ->
09:48:31.677 -> To see this page in action, connect to BT-6MA89Q and open a browser to http://192.168.1.220
09:48:31.772 ->
09:48:31.772 -> Listening on port 8888
This web address just doesn’t load http://192.168.1.220 – Any Ideas ?
I’m running into the same problem that many others seem to have hit. I can’t get the wifi module to connect at all. I’ve swapped two different UNOs, two different Mega2560s, and all the wiring I can. I have the Arduino powered from a 12V wall wart (I had everything on the robot, but pulled it apart to make sure that wasn’t the issue).
The code stops running after the WiFi.init call returns with a WL_NO_SHIELD value, so this isn’t an issue with the network settings. I’ve even tried the network scanner example from the wifi library to see if that might be an issue.
On the UNO I leave the jumpers in place across D4/E_TX and D5/E_RX. On the 2560 I’ve various pairings of E_RX/D1[89] and E_TX/D1[89]. I’m stuck here. Do I have a bad board or is there more testing I can do?
[WiFiEsp] Initializing ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] Cannot initialize ESP module
[WiFiEsp] >>> TIMEOUT >>>
[WiFiEsp] No tag found
WiFi shield not present
Ok, got thru the first part. The shield starts out at 115200bps and without that there’s no communication. Now I can get the shield connected to my local wifi. But, the part that says connect a browser to http://addr:8888 doesn’t work. Shouldn’t the shield be using TCP here? I can see the device on my local network.
11:30:34:179 -> [WiFiEsp] Connected to xxxxx
11:30:34:215 -> You’re connected to the network
11:30:34:251 ->
11:30:34:251 -> IP Address: 192.168.54.36
11:30:34:280 -> 3C:E9:0E:E5:4D:44
11:30:34:301 ->
11:30:34:301 -> To see this page in action, connect to xxxxx and open a browser to http://192.168.54.36:8888
11:30:34:407 -> Listening on port 8888
Do you have a model for App inventor as a guide
what kind of model do you need?please email to [email protected]
Eu gostaria de replicar a app, mas estou com dificuldades. Criaram a app com o MIT Inventor; se sim, como?
Sorry, we don’t know the reason why you want to copy this APP?