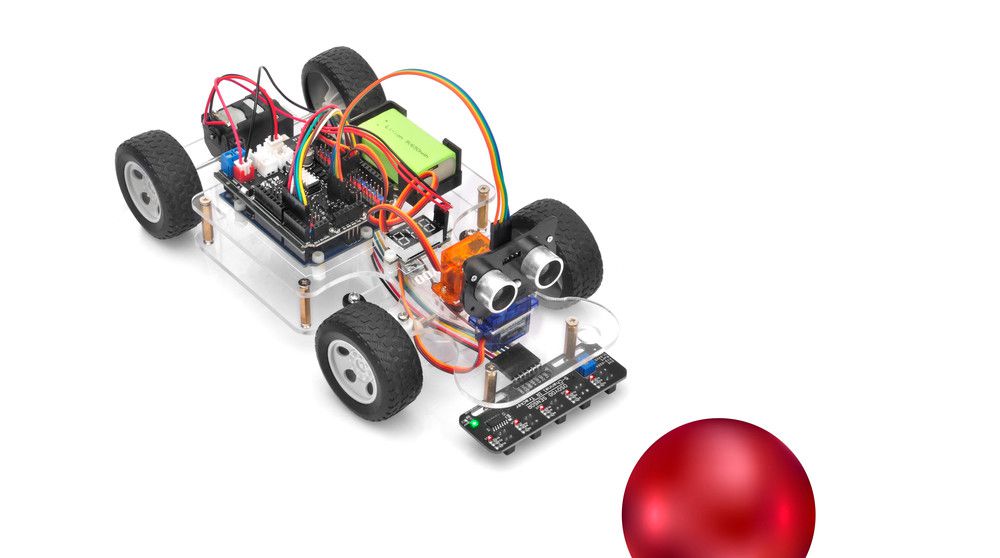
Dans ce tutoriel, nous allons utiliser le module à ultrasons pour « voir » l’obstacle et mesurer la distance. Si la distance est inférieure à une valeur seuil prédéfinie, la voiture de sport se retournera automatiquement de l’obstacle.
Si vous ne terminez pas le châssis de la voiture, veuillez consulter la leçon 1
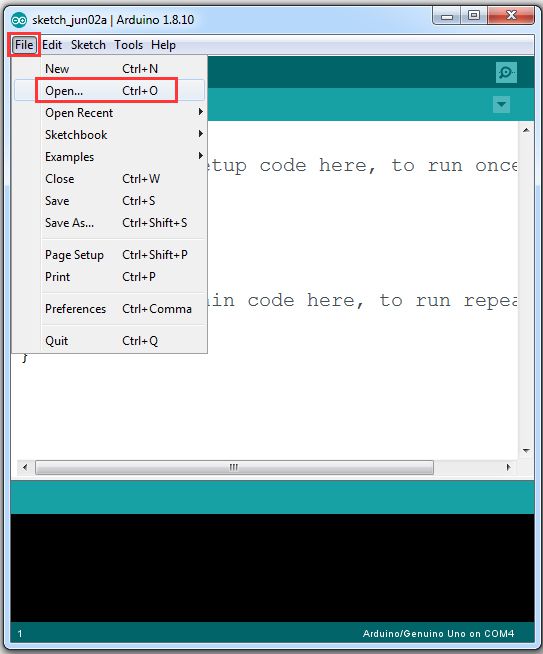
Étape 1 : Veuillez télécharger la bibliothèque PWMServo à partir de https://osoyoo.com/driver/sg90car/PWMServo.zip, puis importer la bibliothèque dans Arduino IDE. Si vous avez terminé la leçon 2, veuillez ignorer cette étape. Étape 2 : Téléchargez l’exemple de code de la leçon 4, décompressez le fichier zip de téléchargement sg90car-lesson4.zip, vous verrez un dossier appelé sg90car-lesson4. Étape 3 : Connectez la carte UNO R3 au PC avec un câble USB, ouvrez Arduino IDE → cliquez sur fichier → cliquez sur Ouvrir → choisissez le code « sg90car-lesson4.ino » dans le dossier sg90car-lesson4, chargez le code dans OSOYOO Basic Board pour Arduino. Remarque : Coupez votre batterie ou débranchez votre adaptateur secteur lorsque vous téléchargez le code d’esquisse sur OSOYOO Basic Board for Arduino.
Étape 4 : Remplacez la valeur par défaut 90 de la ligne 19 par la valeur FRONT de la leçon 1. Si vous alignez manuellement la direction de la roue comme option 1 à l’étape 5 de la leçon 1, ignorez cette étape.
#define FRONT 90 //degree when steering facing straight forward
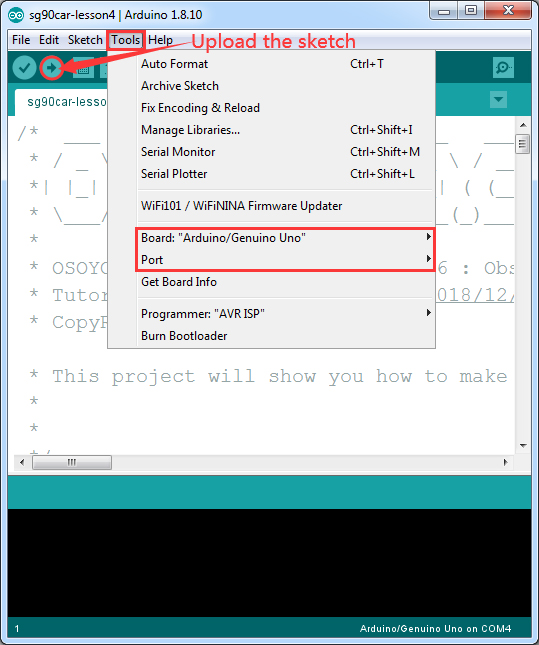
Étape 5 : Choisissez la carte / port correspondant à votre projet, téléchargez l’esquisse sur le tableau.
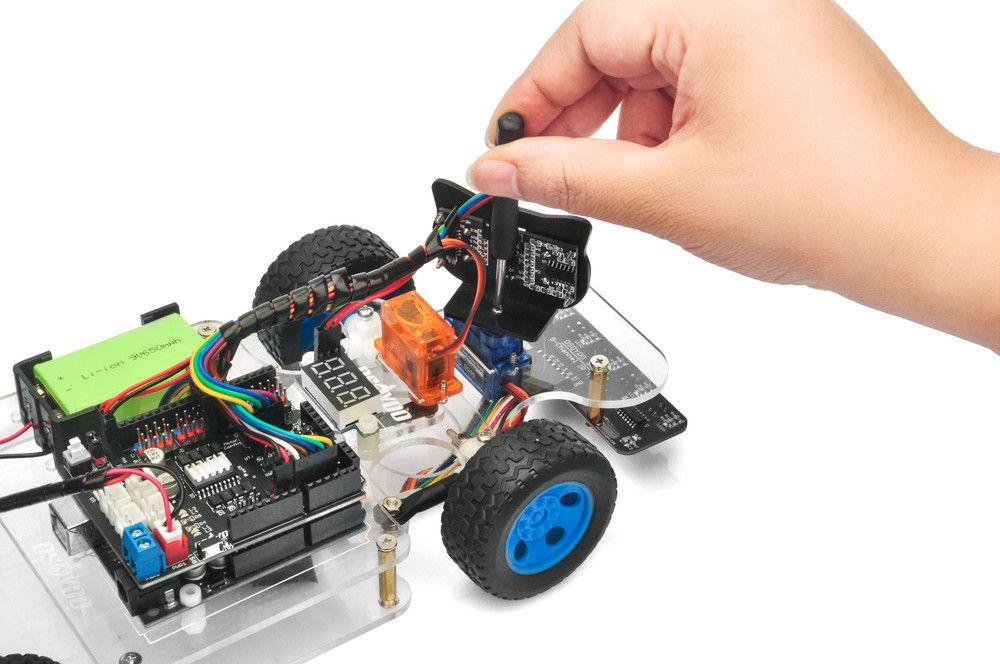
Étape 6 : Alignement initial de la direction initiale du servomoteur à ultrasons
Après la mise sous tension de la voiture, le capteur à ultrasons se déplacera et s’arrêtera finalement dans une direction pendant 2 secondes. Pendant ces 2 premières secondes, vous devez vous assurer que le capteur à ultrasons (deux yeux) est orienté droit vers l’avant. Si ce n’est pas simple, vous devez éteindre la voiture immédiatement et retirer le capteur du servo, le réinstaller et le faire face à la direction droite comme l’image suivante. Sinon, le programme d’évitement d’obstacles ne fonctionnera pas correctement.
Essais finaux
1. Déconnectez OSOYOO Basic Board for Arduino du PC et confirmez que l’interrupteur d’alimentation du bouclier moteur OSOYOO est éteint, puis mettez une batterie 9V dans le boîtier de la batterie. (Remarque : assurez-vous que la direction polaire est correcte, sinon cela peut détruire votre appareil et causer un risque d’incendie).
2. Posez la voiture sur le sol et allumez l’interrupteur d’OSOYOO Motor Shield. Si aucun obstacle n’est détecté, la voiture avancera. Si des obstacles sont détectés, la voiture s’arrêtera, le module à ultrasons tournera de droite à gauche pour détecter l’obstacle environnant. La voiture robot décidera de tourner à gauche, à droite ou en arrière en fonction des données du capteur d’obstacles et de notre algorithme d’évitement d’obstacles.
Parfois, votre voiture peut avoir une collision et faire changer la position de votre capteur à ultrasons, vous devez vous rappeler de faire à nouveau l’alignement de la direction du capteur selon l’étape 6 du lien. Remarque : Si la voiture ne bouge pas selon le résultat mentionné ci-dessus, vous devez vérifier votre connexion filaire du capteur de suivi, la tension de la batterie (doit dépasser 7,2 v).
4. Si vous souhaitez changer l’ange de droite ou de gauche, veuillez modifier la ligne 20 à 23 du code et télécharger à nouveau le croquis : (Remarque : l’ange ne peut pas être réglé plus de 35)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
int RIGHT=FRONT+20;
int LEFT=FRONT-20;
5. Si vous souhaitez modifier la vitesse de la voiture, veuillez réviser le code suivant du croquis (Remarque : la valeur maximale est 255)
I have a problem with my ultrasonic sensor not facing straight forward like it used to. I tried to reinstall it and it did not work… I need help with this. I need a solution. I tried changing codes, and redoing the code all over again but did not work. I’m new to this so any answer to my problem is greatly appreciated. Thank you.












I have a problem with my ultrasonic sensor not facing straight forward like it used to. I tried to reinstall it and it did not work… I need help with this. I need a solution. I tried changing codes, and redoing the code all over again but did not work. I’m new to this so any answer to my problem is greatly appreciated. Thank you.
-TheNewBeggining