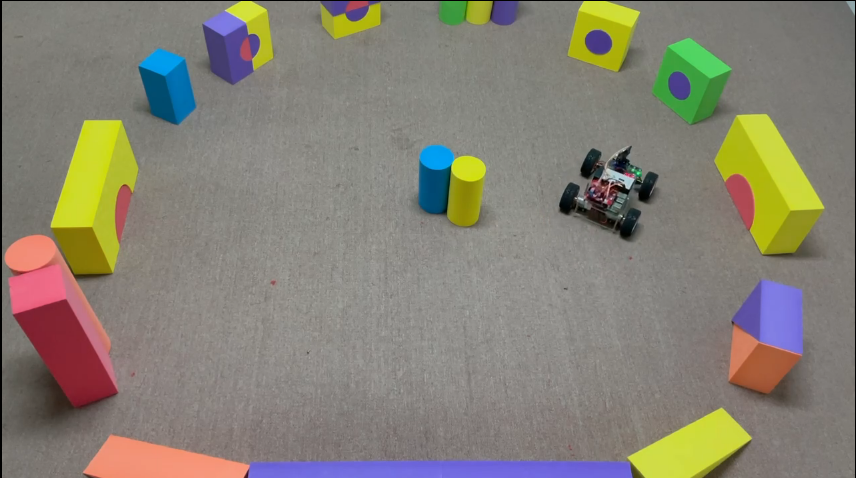
Dans cette leçon, notre voiture robot Raspberry Pi utilisera un capteur à ultrasons pour détecter les obstacles, conduire automatiquement et éviter les collisions.
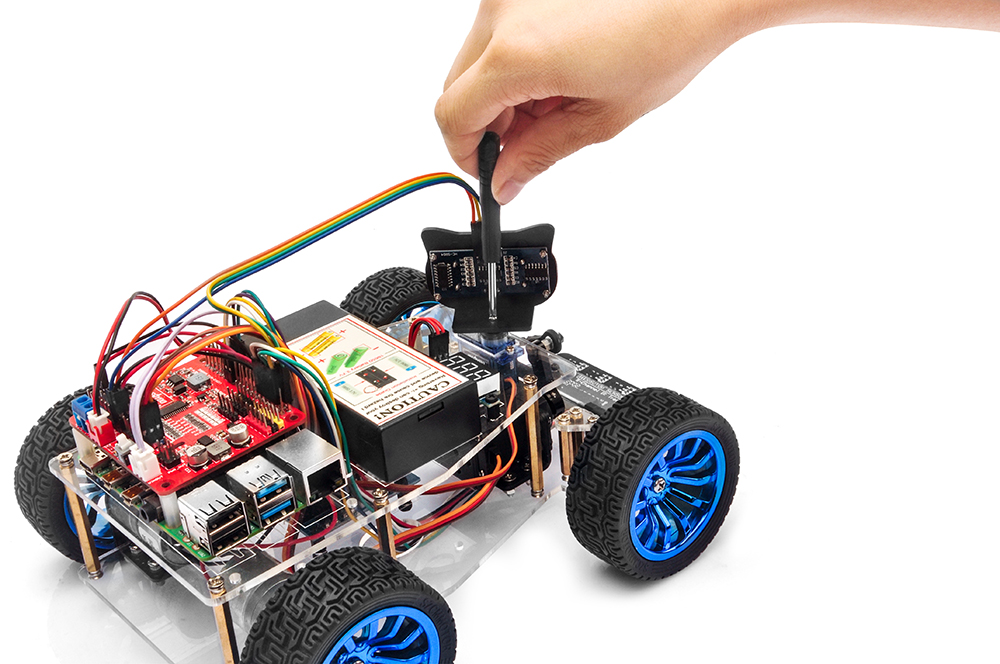
Étape 2 : Installez le moteur servo à l’avant du châssis supérieur de la voiture avec 2 vis auto-taraudeuses M2.2*8.
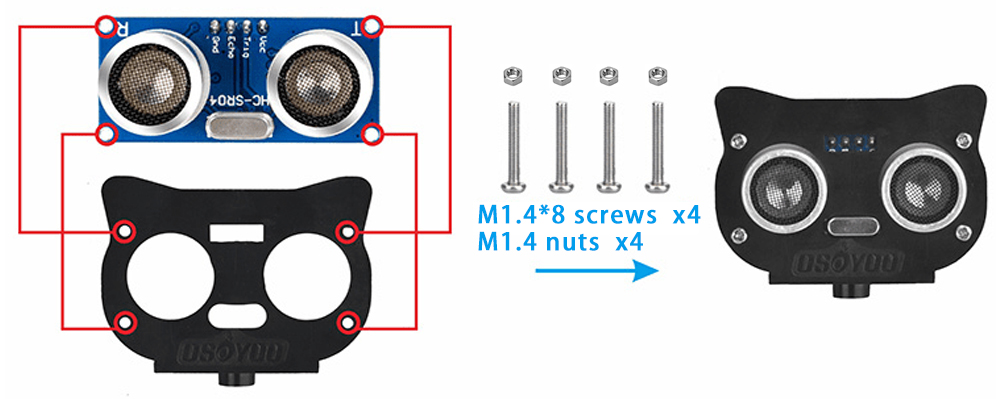
Étape 3 : Installez le module à ultrasons sur le support de montage avec 4 vis M1.4*8 et des écrous M1.4.
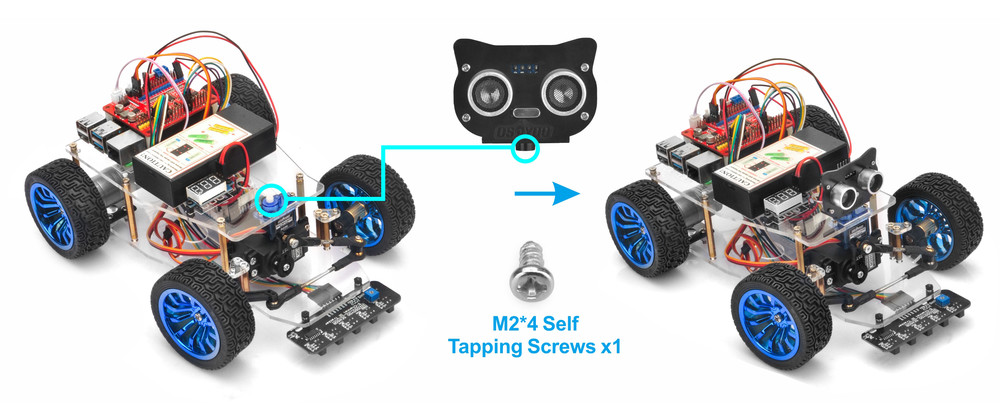
Étape 4 : Installez le support à ultrasons sur le micro-moteur servo avec 1 vis auto-taraudeuse M2*4.
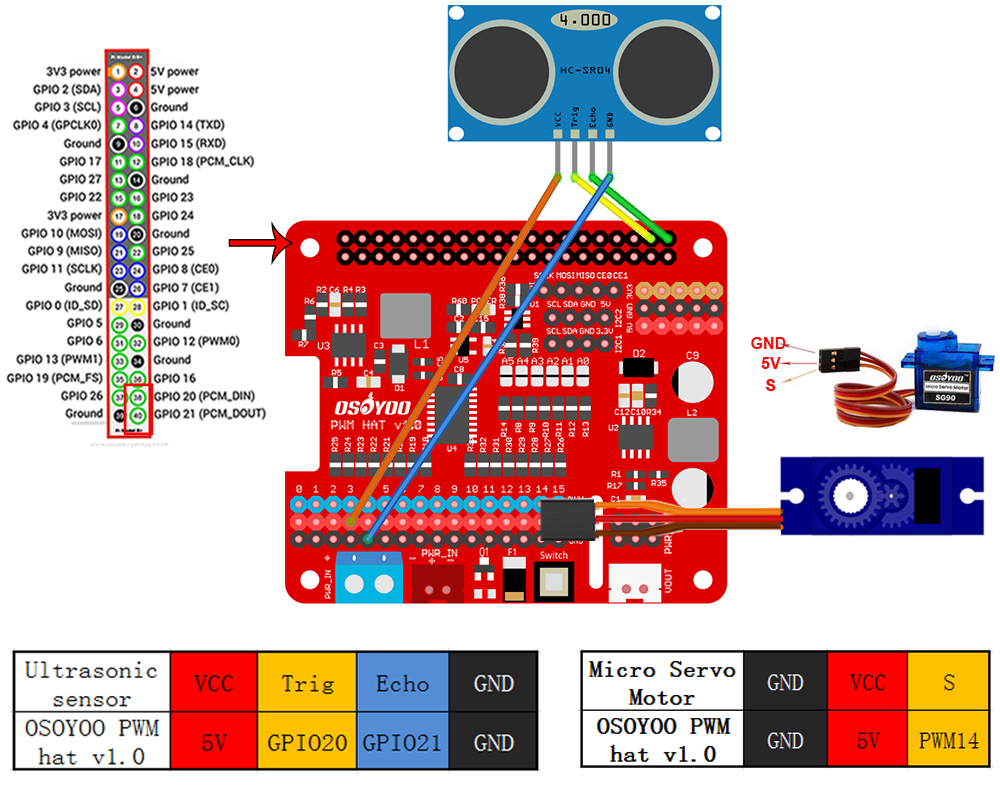
Connectez le support du capteur à ultrasons au moteur servo SG90 sur le port PWM 14 de la carte OSOYOO PWM HAT, et connectez GND et VCC du module à ultrasons à GND et 5V de la carte OSOYOO PWM HAT. Ensuite, connectez TRIG et ECHO du module à ultrasons aux broches GPIO20 et GPIO21 du Raspberry Pi comme indiqué sur le schéma suivant (N’oubliez pas : NE retirez PAS les fils existants installés dans la Leçon 1) :
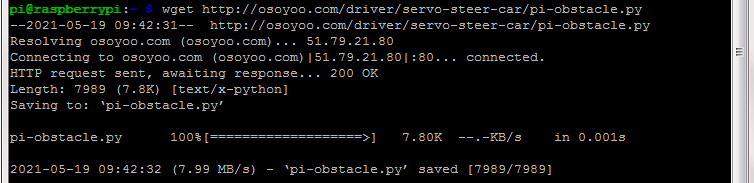
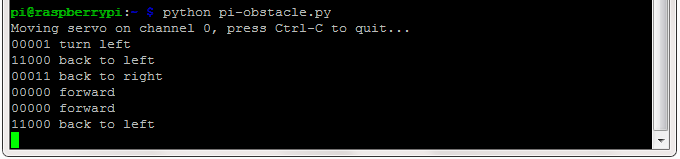
Téléchargez le code Python en tapant la commande suivante dans votre terminal Raspberry Pi :
Allumez la batterie de votre voiture et de votre servo, puis exécutez le programme.
Si vous utilisez Python 2 sur Raspberry Pi, tapez:
python pi-obstacle.py
Votre servo fera tourner le capteur à ultrasons vers la position frontale pendant 3 secondes. Si votre capteur ne fait pas face à l’avant, veuillez éteindre la batterie ou appuyer sur la touche Ctrl-C pour arrêter le programme. Retirez ensuite le capteur du servo, réinstallez-le en vous assurant qu’il fait face à l’avant et fixez-le en place avec une vis. Maintenant, vous pouvez taper la même commande python pi-obstacle.py et exécuter à nouveau le programme.
Maintenant, la voiture effectuera automatiquement une conduite évitant les obstacles.