Dans cette leçon, nous ajouterons un capteur de suivi de ligne à 5 lignes au cadre construit dans la leçon 1. Si vous n’avez pas terminé l’installation de la leçon 1, veuillez la revoir.
Le logiciel de cette leçon lira les données des capteurs de suivi et guidera automatiquement la voiture pour qu’elle se déplace le long de la ligne de piste noire sur le sol blanc.
Installation Matérielle
Étape 1: Commencez l’installation à partir de l’état précédent de la leçon 1. Si vous avez installé la leçon 2, il n’est pas nécessaire de changer quoi que ce soit, gardez simplement la connexion des fils matériels telle qu’elle est.
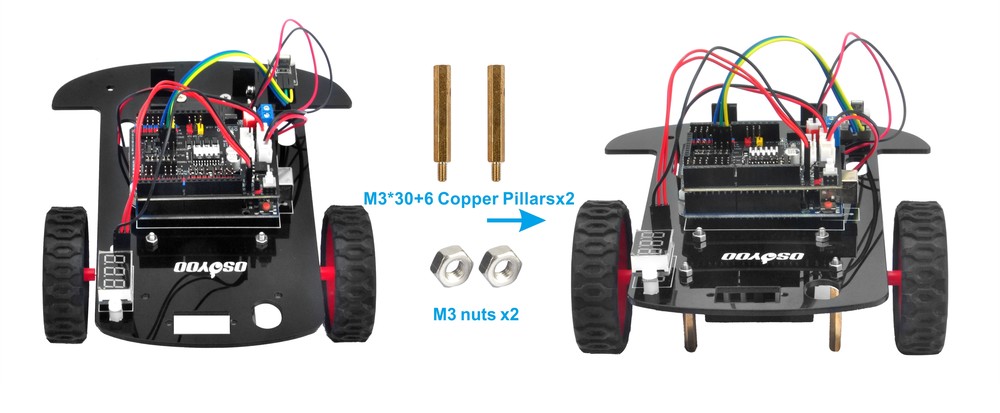
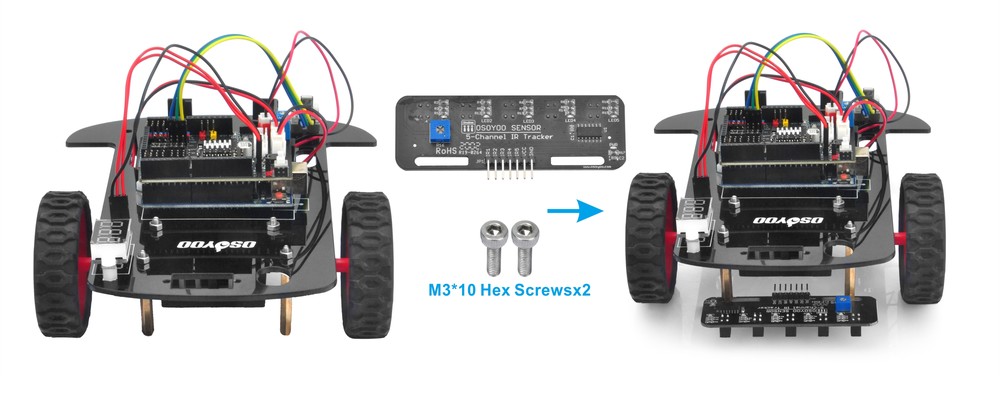
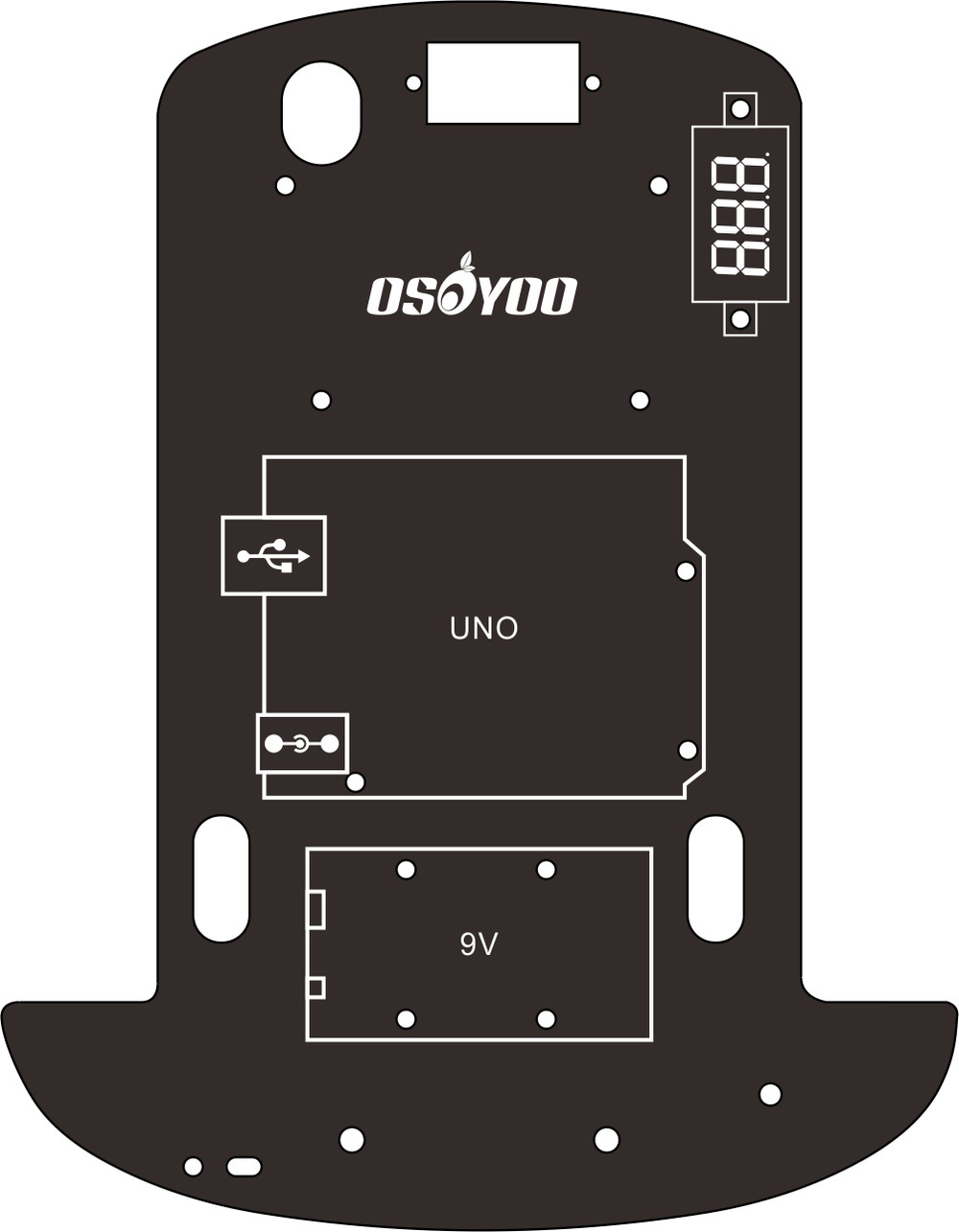
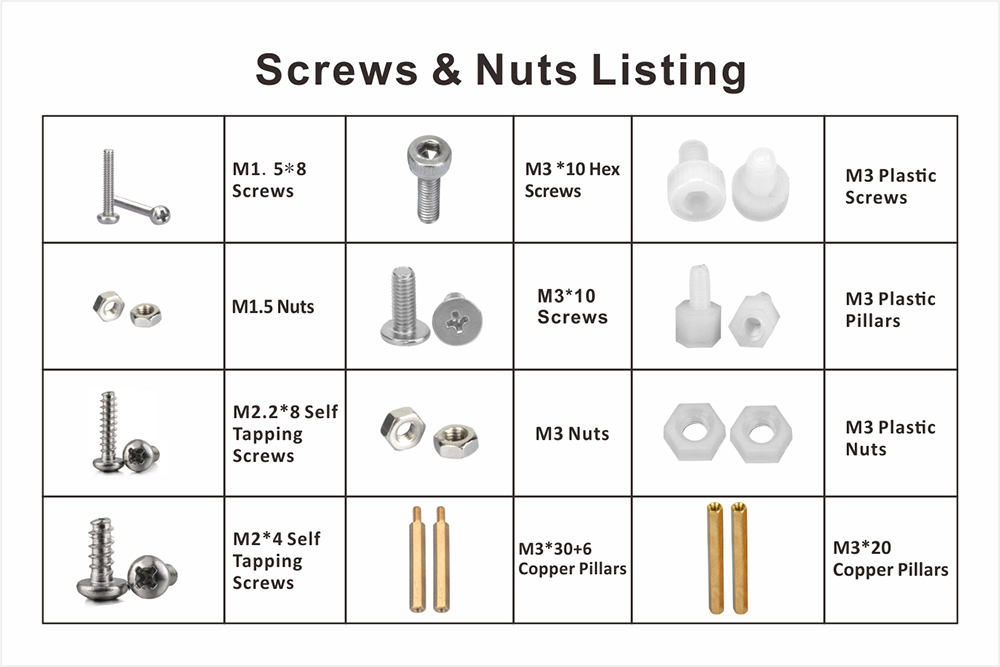
Étape 2:Installez le module de capteur de suivi de ligne à 5 lignes sous le châssis de la voiture avec 2 vis hexagonales M310, des colonnes en cuivre M330+6 et des écrous M3 comme suit:
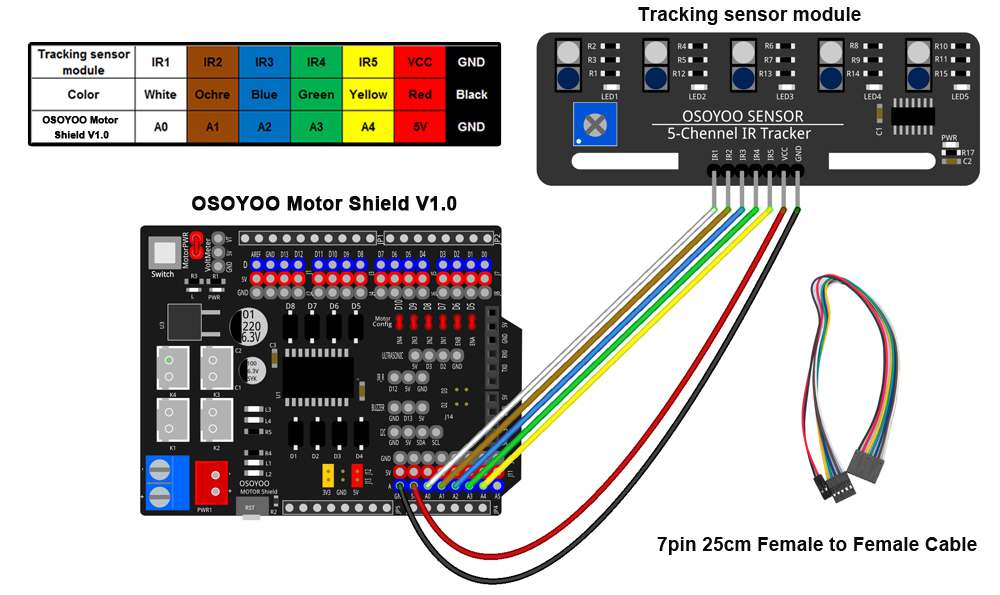
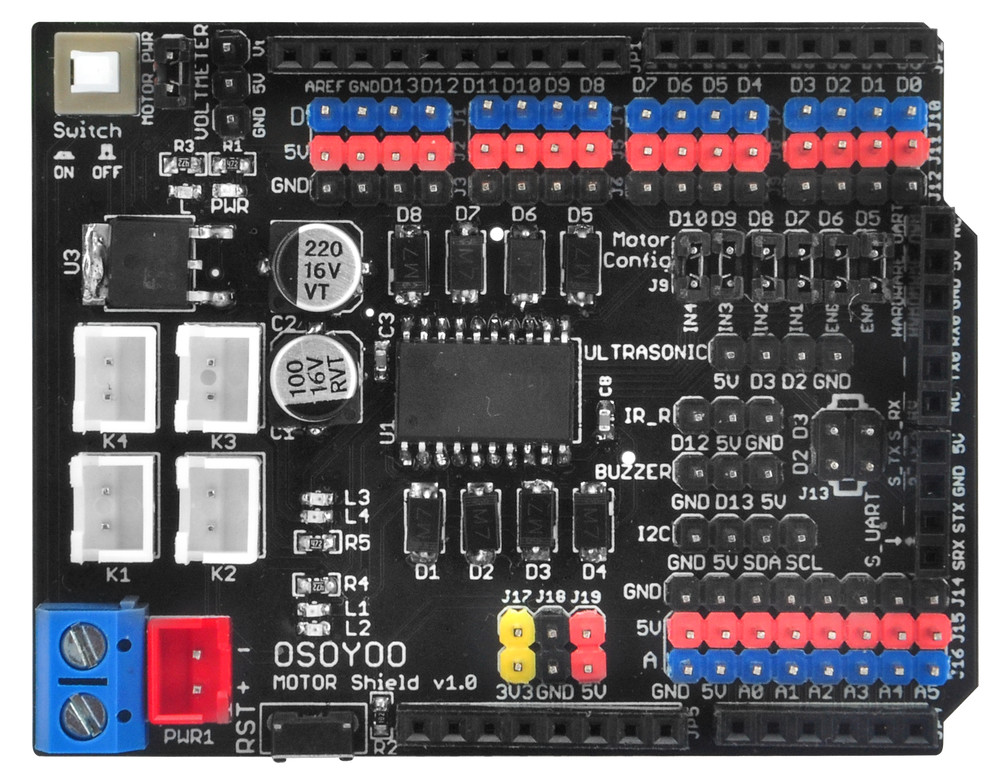
Étape 3: Connectez la broche GND-VCC du module de capteur de suivi au GND-5V du bouclier moteur OSOYOO. Connectez les broches IR1, IR2, IR3, IR4, IR5 à A0, A1, A2, A3, A4 avec un câble femelle-femelle à 7 broches et 25 cm comme indiqué sur la photo suivante (Rappelez-vous: NE retirez PAS les fils existants installés dans la leçon 1):
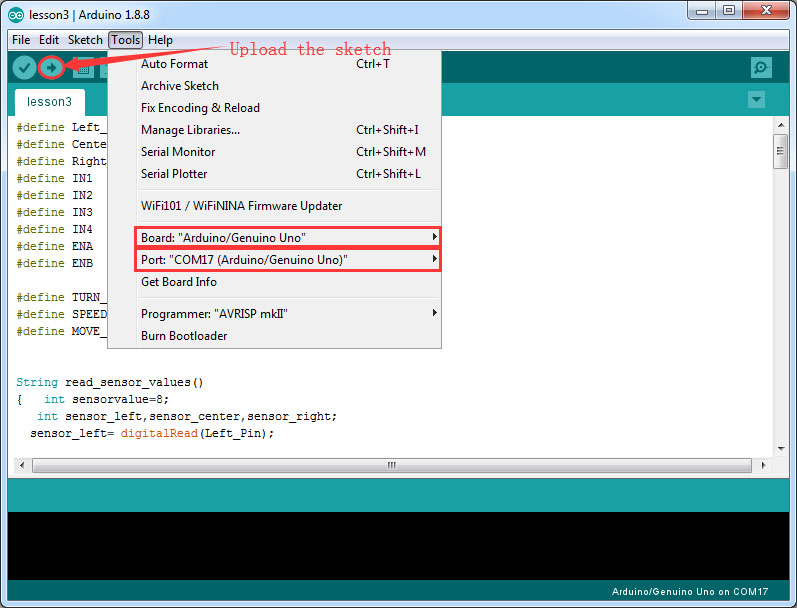
Connectez la carte de base OSOYOO pour Arduino à votre PC à l’aide d’un câble USB, ouvrez l’IDE -> cliquez sur Fichier -> cliquez sur Ouvrir -> choisissez le code “lesson3.ino” dans le dossier lesson3, chargez le code dans la carte.
Remarque : éteignez votre batterie ou débranchez votre adaptateur d’alimentation lorsque vous téléchargez le code de croquis sur la carte OSOYOO Basic Board for Arduino.
Étape 4:
Choisissez la carte et le port correspondants à votre projet, téléversez le croquis sur la carte.
Étape 5:
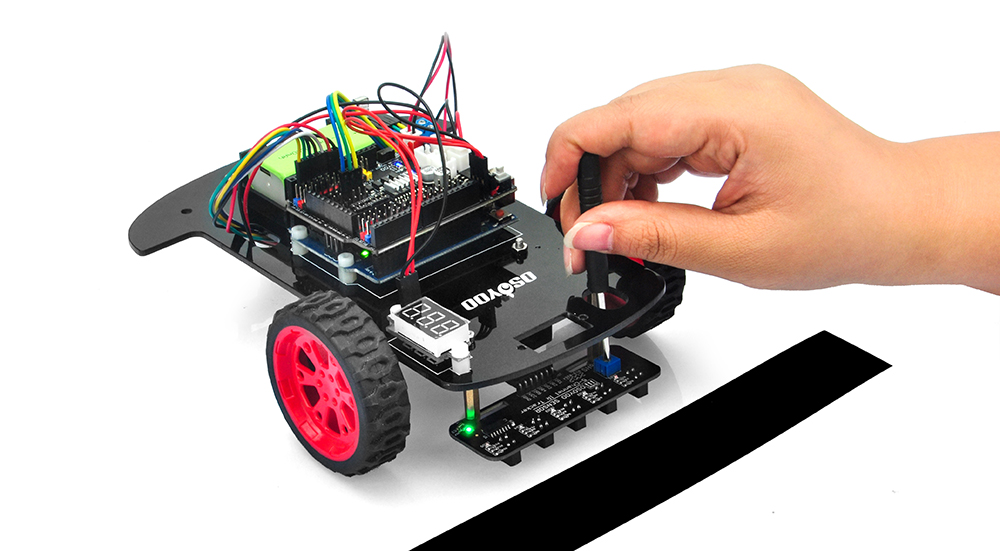
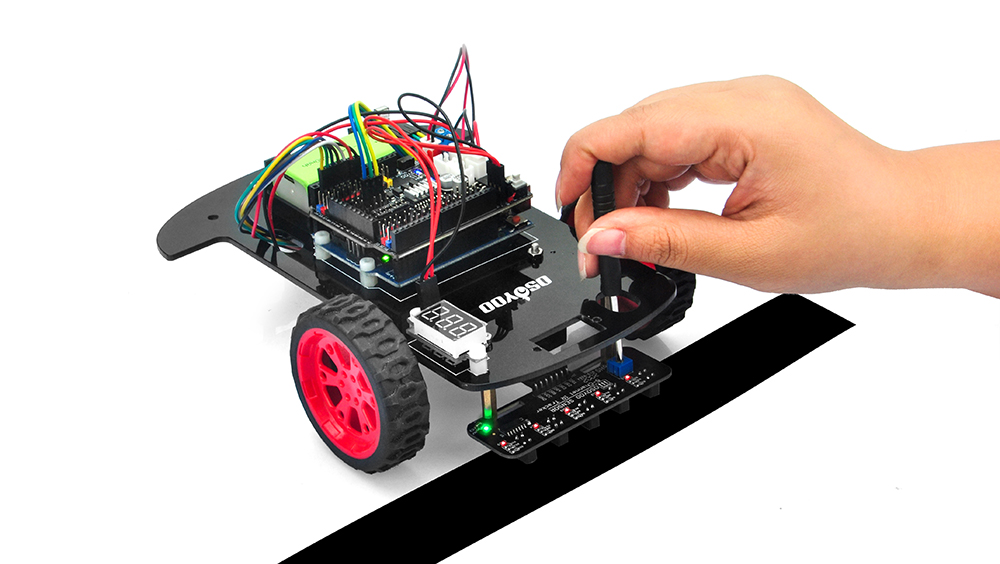
Ajustez la sensibilité des modules de capteur de suivi. Allumez et maintenez la voiture et ajustez le potentiomètre sur le capteur de suivi avec un tournevis cruciforme jusqu’à ce que vous obteniez le meilleur état de sensibilité:
le voyant lumineux d’indicateur de signal s’éteindra lorsque le capteur est au-dessus du sol blanc et le voyant lumineux de signal s’allumera lorsque le capteur est au-dessus de la piste noire.
Testing:
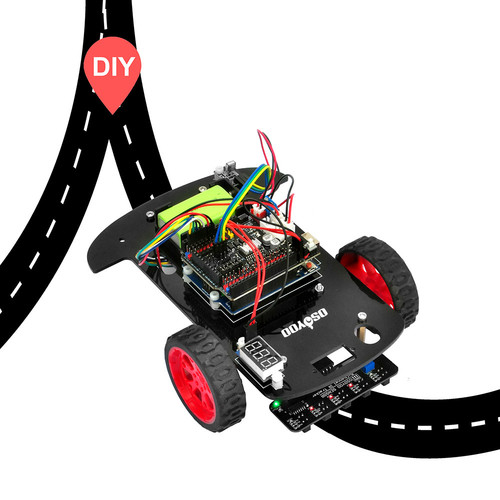
Préparez une piste noire (la largeur de la piste noire est supérieure à 20 mm et inférieure à 30 mm) sur le sol blanc. Veuillez noter que l’angle de courbure de la piste ne peut pas dépasser 90 degrés. Si l’angle est trop grand, la voiture sortira de la piste.
Allumez la voiture et placez le milieu du module de capteur de suivi de ligne face à la piste noire, et la voiture se déplacera le long de la piste noire.
Pièces et dispositifs:
N°
Dispositif
Image
Qté
Accessories
1
Carte de base OSOYOO (entièrement compatible avec Arduino UNO R3)





























The code doesn’t work. Sensors are working but even though sensors are having “00001” etc the robot is not moving right. Sometimes it moves randomly.