


I.目的
II.部品とデバイス
III.ハードウェアインストール
IV.ソフトウェアインストール
VI.遊び方

| アメリカで購入 |
イギリスで購入 |
ドイツで購入 |
イタリアで購入 |
フランスで購入 |
スペインで購入 |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

このレッスンでは、ライントラッキング自動運転プロジェクトを行います。レッスン1で構築したロボットカーに5ポイントトラッキングセンサーモジュールを追加します。このレッスンのソフトウェアは、5ポイントトラッキングセンサーモジュールからデータを読み取り、白い地面の黒いトラックラインに沿ってスマートカーが自動的に移動するようにガイドします。
このライントラッキングプロジェクトを行う前に、レッスン1を完了する必要があります。

OSOYOOメカナムホイールロボットカーシャーシ x1
OSOYOOホイールとモーター x4(左ホイール x2/右ホイール x2)
Raspberry pi 4/5ボード(このキットには含まれていません)
OSOYOO PWM HATシールド x1
OSOYOO Model Yドライバーボード x1
OSOYOO電圧計 x1
OSOYOO 5ポイントトラッキングセンサーモジュール x1
OSOYOOバッテリーボックス x1
OSOYOO 3ピンメス-メスジャンパーワイヤー x1
OSOYOO 6ピンメス-メスジャンパーワイヤー x2
OSOYOO 7ピンメス-メスジャンパーワイヤー x1
OSOYOO 2ピンXH.25メス-メス x1
18650バッテリー(3.7V)x2
バッテリー充電器 x1

ステップ0. レッスン1のすべての接続をそのまま保持してください。(警告:レッスン1で事前にインストールされたワイヤーを取り外さないでください)。
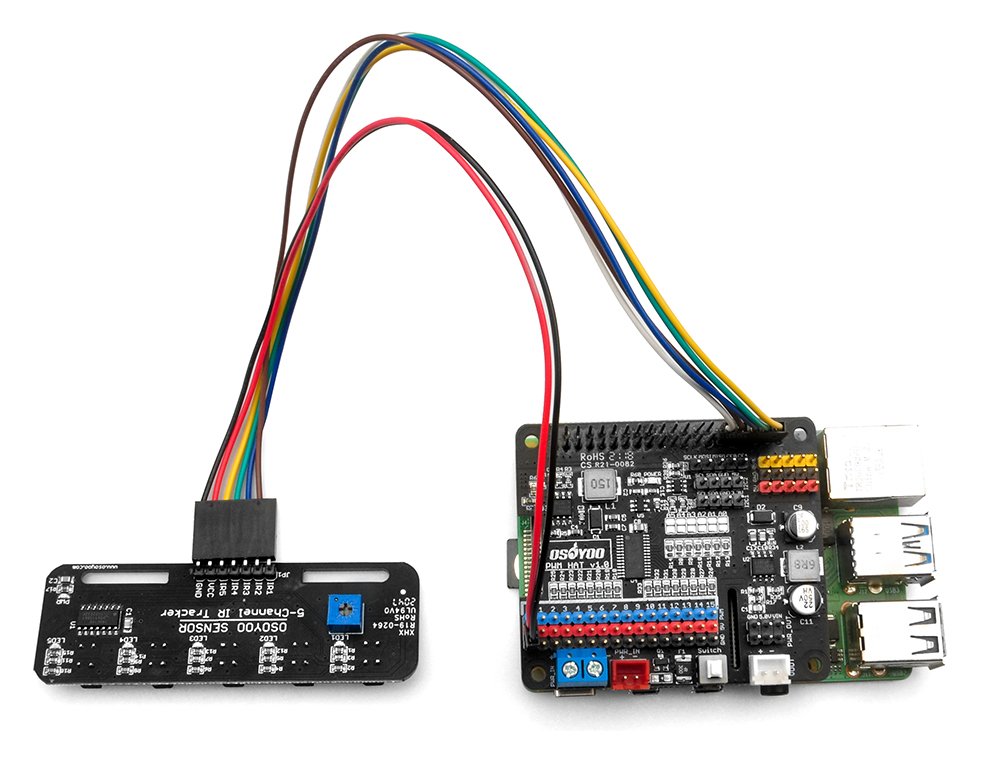
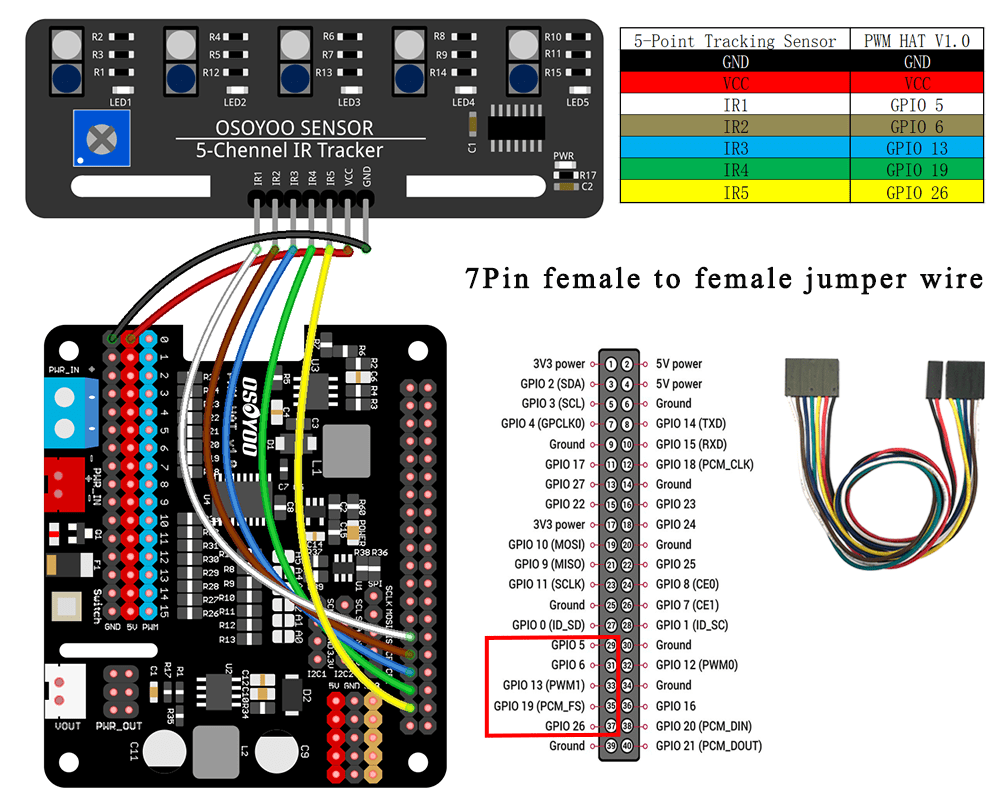
ステップ1. トラッキングセンサーモジュールのGNDとVCCピンを、それぞれOSOYOO PWM HATシールドのGNDと5Vピンに接続します。次に、以下の写真に示すように、7ピン25cm F/Fケーブルを使用してIR1-IR5ピンをGPIO5、GPIO6、GPIO13、GPIO16、A1にリンクします。
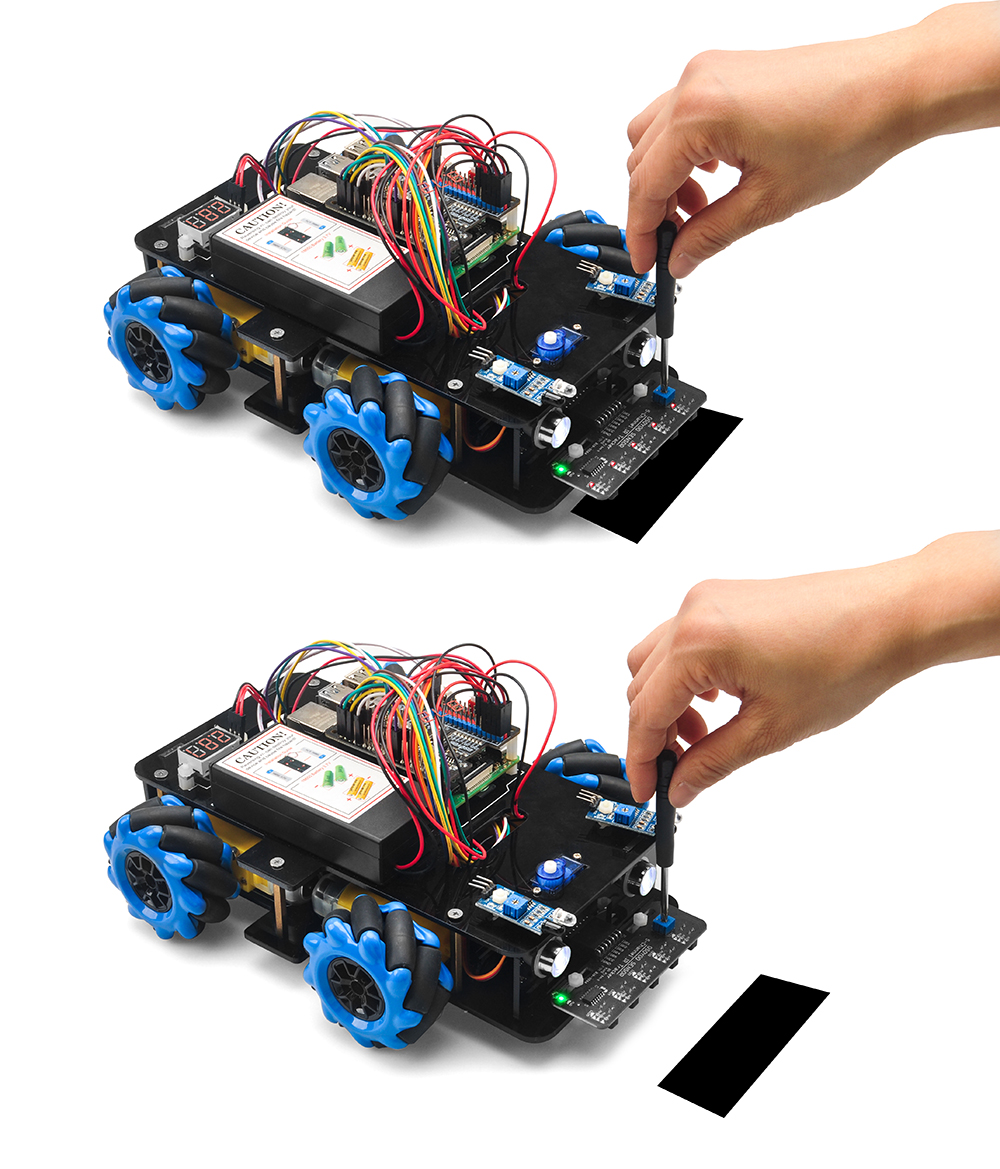
 ステップ2. トラッキングセンサーの感度を調整するには:
ステップ2. トラッキングセンサーの感度を調整するには:
カーを静止状態に保ちながらバッテリーボックスの電源を入れます。プラスドライバーを使用して各トラッキングセンサーのポテンショメーターを調整し、最適な応答を実現します:
黒いトラックを検出した時にシグナルLEDがON
白い表面の上ではシグナルLEDがOFF。

以下のコマンドを実行してください:
wget https://osoyoo.com/driver/mecanum/linetracking5.py
python linetracking5.py
最終テスト:
明るい色の表面に黒いトラック(幅20-30mm)を準備します。カーがトラッキングを失わないように、急カーブは避けてください(推奨最小半径:15cm)。
カーの電源を入れ、トラッキングセンサーモジュールを黒いトラックの中央に配置します。カーは自動的にトラックに沿って進みます。









