


I.目的
II.部品とデバイス
III.ハードウェアインストール
IV.ソフトウェアインストール
VI.遊び方
トラブルシューティング

| アメリカで購入 |
イギリスで購入 |
ドイツで購入 |
イタリアで購入 |
フランスで購入 |
スペインで購入 |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

このレッスンでは、障害物回避自動運転プロジェクトを行います。超音波モジュールを使用して障害物を「見る」ことで、カーは自動的に障害物から回避します。
このレッスンを続ける前に、レッスン1を完了する必要があります。

OSOYOOメカナムホイールロボットカーシャーシ x1
OSOYOOホイールとモーター x4(左ホイール x2/右ホイール x2)
Raspberry pi 4/5ボード(このキットには含まれていません)
OSOYOO PWM HATシールド x1
OSOYOO Model Yドライバーボード x1
OSOYOO電圧計 x1
OSOYOO MG90サーボモーター x1
OSOYOO超音波センサーモジュール x1
OSOYOOマウントホルダー x1
OSOYOOバッテリーボックス x1
OSOYOO 3ピンメス-メスジャンパーワイヤー x1
OSOYOO 6ピンメス-メスジャンパーワイヤー x2
OSOYOO 10ピンメス-メスジャンパーワイヤー x1
OSOYOO 2ピンXH.25メス-メス x1
18650バッテリー(3.7V)x2
バッテリー充電器 x1

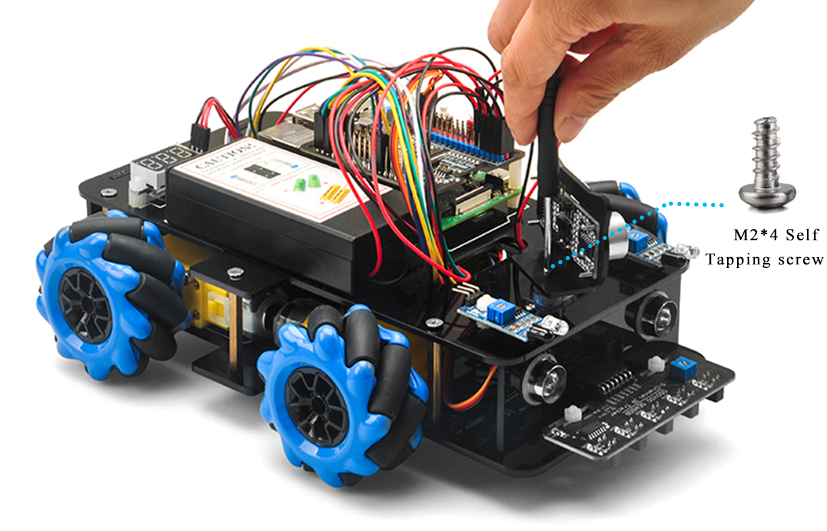
ステップ1. 4本のM1.5×8mmネジと4個のM1.5ナットを使用して、超音波モジュールをホルダーに取り付けます。

ステップ2. SG90サーボモーター内のネジを使用して、超音波モジュール用のマウントホルダーをSG90サーボモーターに取り付けます。
ステップ3. レッスン1のすべての接続をそのまま保持してください。
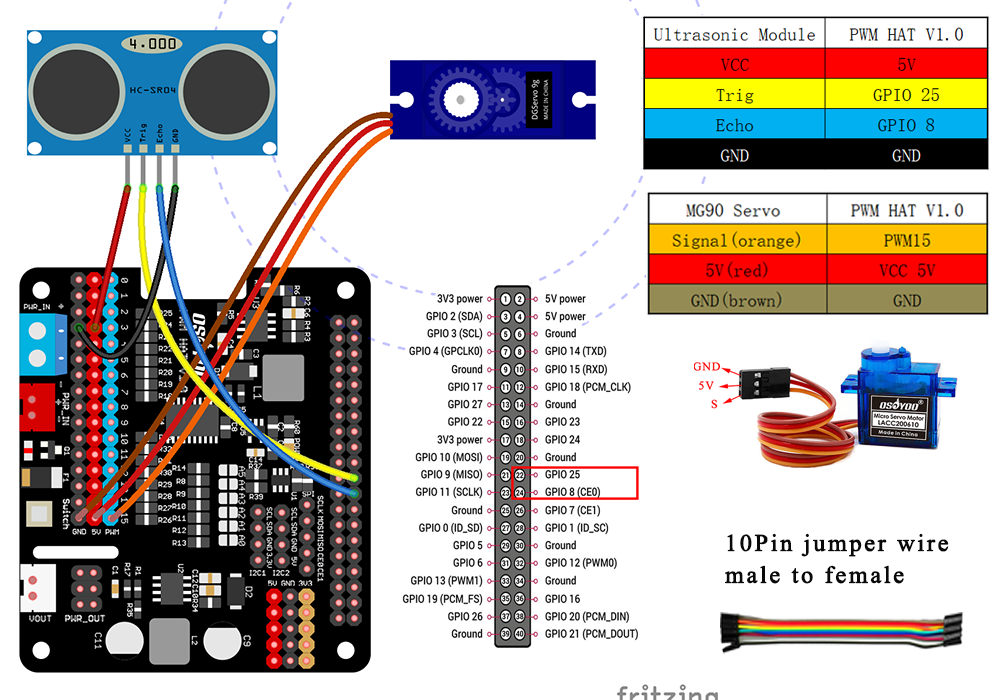
以下のように、SG90サーボモーターと超音波モジュールをOSOYOO PWM HATシールドに接続します。
注意:10本のジャンパーワイヤーバンドルから4本のメス-メスジャンパーワイヤーを分離する必要があります。バンドルからどの色でも構いません。残りのワイヤーは、破損または損傷したワイヤーの予備部品として使用します。

PCからUSB-Cケーブルを介してraspberry pi 4に接続し、PuTTYを開いてIPアドレス(またはHost Name pi)とポート22(デフォルトでは22)を入力し、openをクリックします。
他のOS PCでsshツールを使用してRaspberry Piをリモート制御し、以下のコマンドでサンプルコードを実行します:
wget https://osoyoo.com/driver/mecanum/mecanum_oa5.py
python mecanum_oa5.py
超音波センサーサーボ初期方向調整
サーボは動作を行い、最終的に前方向で3秒間停止します。
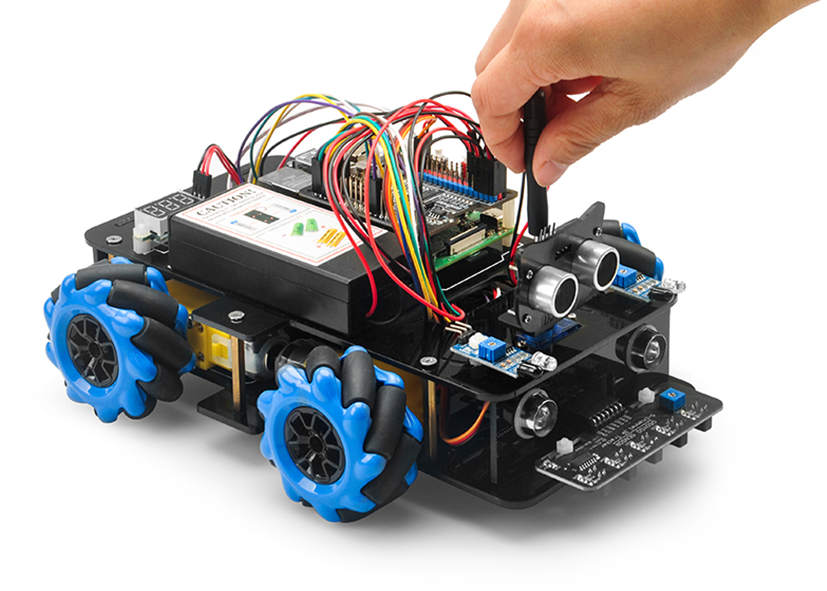
この最初の3秒間に超音波センサーが前方を向いていない場合は、すぐにバッテリーをオフにし、サーボからセンサーを取り外し、再度取り付けて以下の写真のように真っ直ぐ前方向を向くようにしてください。そうしないと、障害物回避プログラムが正常に動作しません。
センサー方向を調整した後、再度バッテリーをオンにすると、センサーは以下の写真と同じように前方を向くはずです。方向が真っ直ぐ前方でない場合は、バッテリーをオフにして再度方向調整を行ってください。
最終テスト:
バッテリーボックスのバッテリースイッチをオンにした後、超音波モジュールが前方視野位置に向いた場合、センサー位置をもう調整する必要がないことを意味します。3秒間待ってください。障害物が検出されない場合、カーは前進します。障害物が検出された場合、カーは停止し、超音波モジュールは右から左に回転して周囲の障害物を検出します。ロボットカーは、障害物センサーデータと我々の障害物回避アルゴリズムに従って、左折、右折、または後退を決定します。
時々、カーが衝突して超音波センサーの位置が変わることがあります。その場合は、超音波センサーサーボ初期方向調整のリンクに従って、再度センサー方向調整を行うことを忘れないでください。

他のOS PCでsshツールを使用してRaspberry Piをリモート制御し、以下のコマンドでサンプルコードを実行します:
python mecanum_oa5.py









