
| アメリカで購入 |
イギリスで購入 |
ドイツで購入 |
イタリアで購入 |
フランスで購入 |
スペインで購入 |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

このレッスンでは、ロボットカーに2個のIR距離センサーを取り付け、物体の動きに追従するようにカーをプログラムします。カーはIR距離センサーからの信号を受信し、プログラムがカーを動作させます。

OSOYOOメカナムホイールロボットカーシャーシ x1
OSOYOOホイールとモーター x4(左ホイール x2/右ホイール x2)
Raspberry pi 4Bボード
OSOYOO PWM HATシールド x1
OSOYOO Model Yドライバーボード x1
OSOYOO電圧計 x1
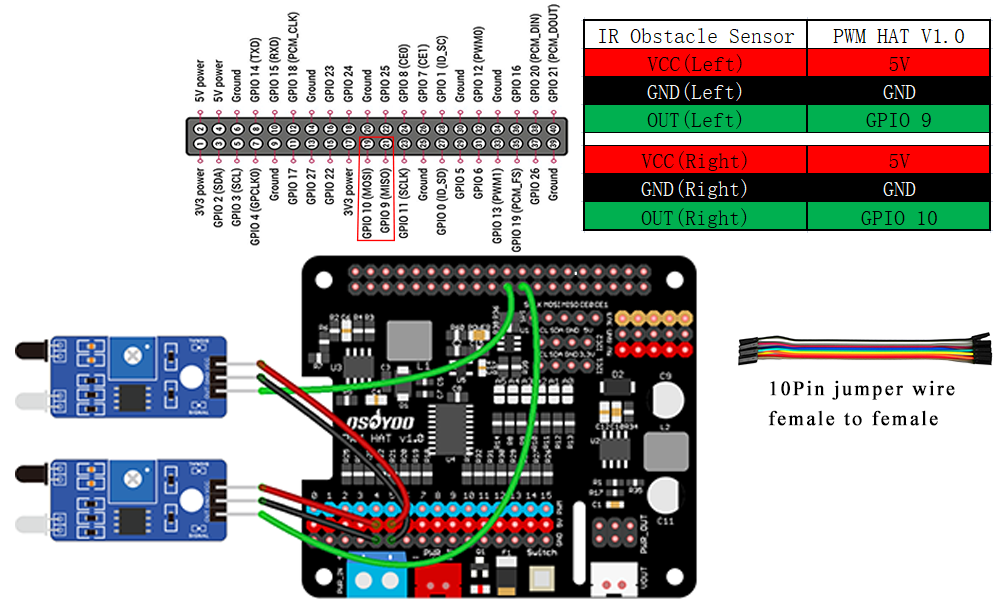
OSOYOO IR距離センサー x2
OSOYOOバッテリーボックス x1
OSOYOO 3ピンメス-メスジャンパーワイヤー x1
OSOYOO 6ピンメス-メスジャンパーワイヤー x2
OSOYOO 10ピンメス-メスジャンパーワイヤー x1
OSOYOO 2ピンXH2.54メス-メス x1
18650バッテリー(3.7V)x2
バッテリー充電器 x1

ステップ1:スマートカーレッスン1に従ってスマートカーの基本フレームワークをインストールします。レッスン1でインストールを既に完了している場合は、そのまま保持してください。
ステップ2:以下の接続図に従って2個のIR距離センサーモジュールを接続します。(注意:レッスン1でインストールされた既存のワイヤーを取り外さないでください)。

ステップ3:レッスン1でrpi.gpio、PCA9685ライブラリをインストールし、I2Cを有効にしていることを確認してください。
ステップ4:ロボットカーの電源を入れ、SSHツールを使用してRaspberry Piターミナルで以下のコマンドを入力してpythonコードをダウンロードします。
wget https://osoyoo.com/driver/mecanum/follower5.py
python follower5.py
ステップ5:各IR距離センサーの前約10cm先に物体を置き、IR距離センサーのポテンショメーターを調整して物体や手を検出できるようにします。
カーの前で物体や手を動かすと、カーはそれに応じて動きます:まるであなたがそれを引っ張っているように見えます。両方のIR障害物回避モジュールが物体や手を検出すると前進し、右のIR障害物回避モジュールが物体を検出すると右折し、左のIR距離センサーが物体を検出すると左折します。
物体や手が10cm以上離れると、停止します。
注意:これらのIRモジュールが物体を検出すると、電源インジケーターと信号インジケーターの両方が点灯します。物体が検出されない場合は、電源インジケーターのみが点灯し、信号インジケーターは消灯します。センサーの前に障害物がないにもかかわらず信号インジケーターが常に点灯している場合は、ポテンショメーターを調整する必要があります。

sshターミナルで以下のコマンドを実行してください:
python follower5.py









