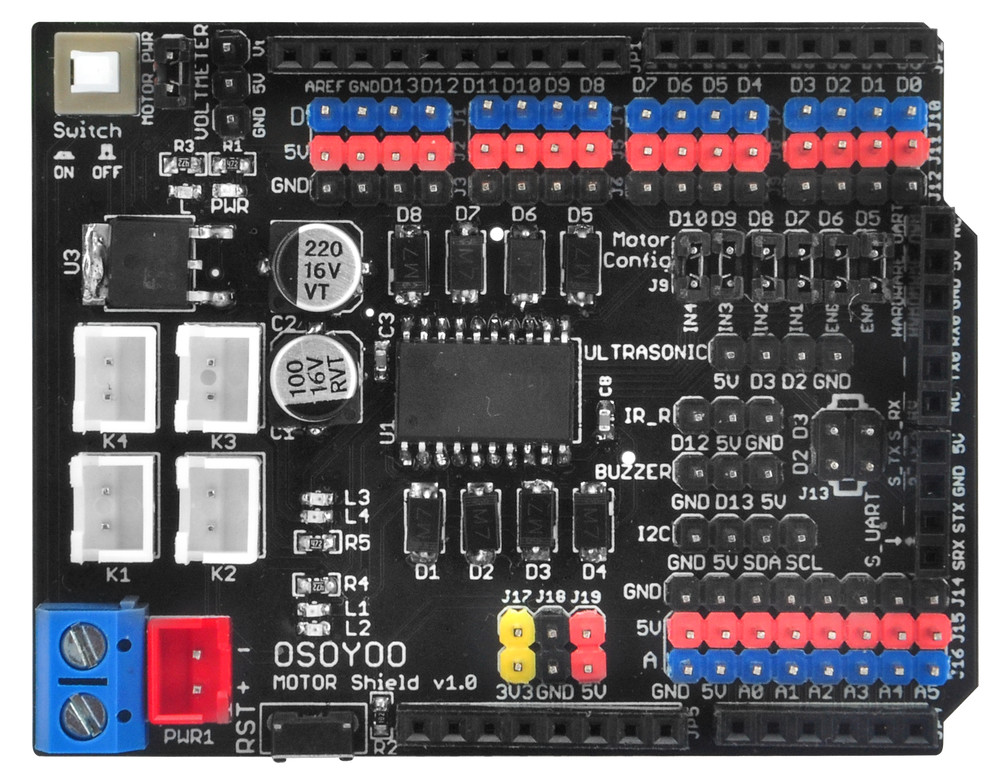
Wire Connection
Remove Jumper on ENA,IN1,IN2
| PART |
Motor Shield |
| IN3 jumper |
D9 |
| IN4 jumper |
D10 |
| ENB jumper |
D6 |
| Steer Servo |
D7 |
| Sensor Servo |
D8 |
| Back Motor |
K3 or K4 |
Steering Servo Alignment:
Before you run the Lesson 2 sketch code, please test the steering servo direction by download and running following sketch code:
https://osoyoo.com/driver/sg90car/steeringtest.zip
After unzip above file and running above steeringtest.ino sketch code, your steering wheels will rotate from left to right and finally stop at the center direction.
If your steering servo does not facing face to center front direction, then you have two options:
Option 1 ) Use a screw driver to release the steer arm from servo, re-align the wheel direction manually and then fasten the arm onto servo again.
or
Option 2) You can change the default value of line 4
#define FRONT 90
if your steering wheels tends to left, increase the value from 90 to 95,100,105 …
if your steering wheels tends to right, decrease the value from 90 to 85,80,75 …
Run the sketch again until your steering wheels finally faces to front.
Then write down the FRONT value, we will use this value to change the lesson2,3,4,5,6 sketch code and make steering servo always facing front at default FRONT value.
Software Installation
Download file from Link: https://osoyoo.com/driver/sg90car/sg90car-lesson2.zip
Unzip the file and run the sg90car-lesson2.ino file, if you use OPTION 2) to align the steering servo, remember to change the FRONT value to in line 19 to match your OPTION 2) test. (lesson 3,4,5,6 needs to the s
your car will move forward, backward, left turn, right turn, back to right, back to left.