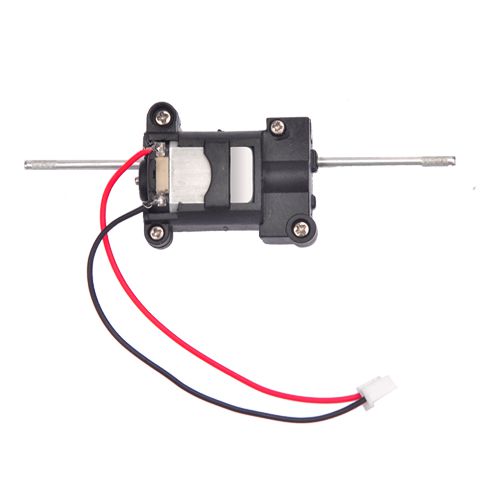
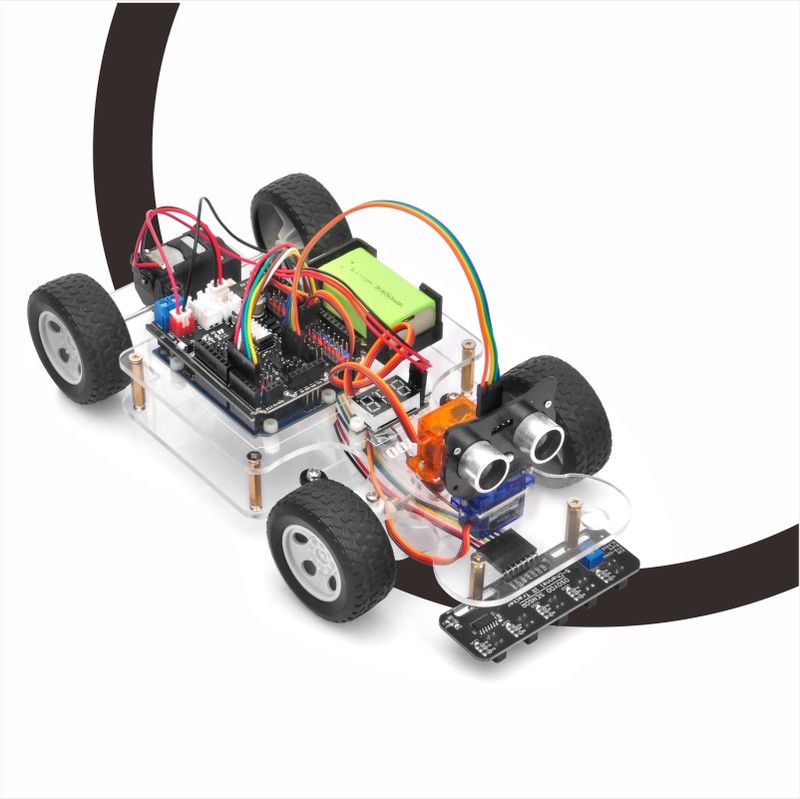
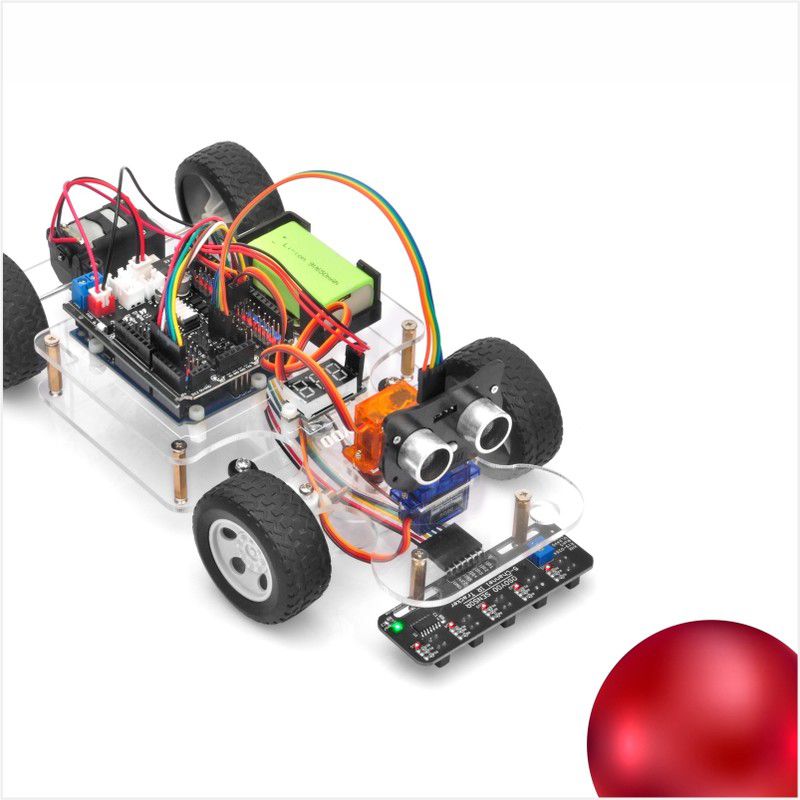
OSOYOO sport car kit for Arduino uses an easy-to-install Servo Steering Rack to replace the old-fashioned Differential Steering used by most robots for Arduino in the market. This Servo Steering Rack works quite similar to real car steering mechanical system and therefore has better performance.
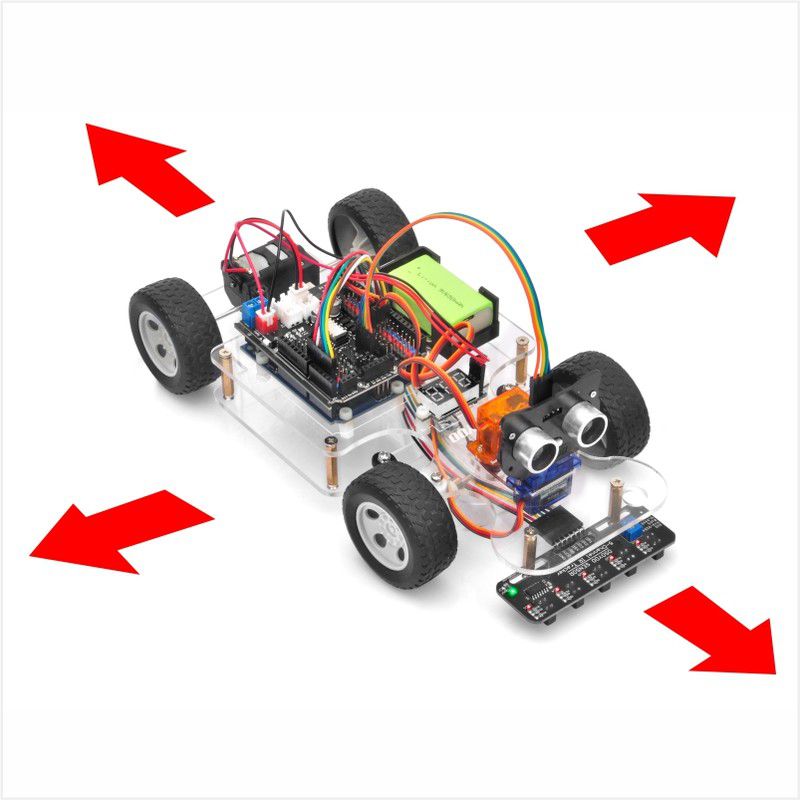
OSOYOO Sport Car Kit for Arduino an educational STEM kit to get hands-on experience about programming, electronics assembling, robot mechanics knowledge. It is an integration solution for robotics learning and made for education.
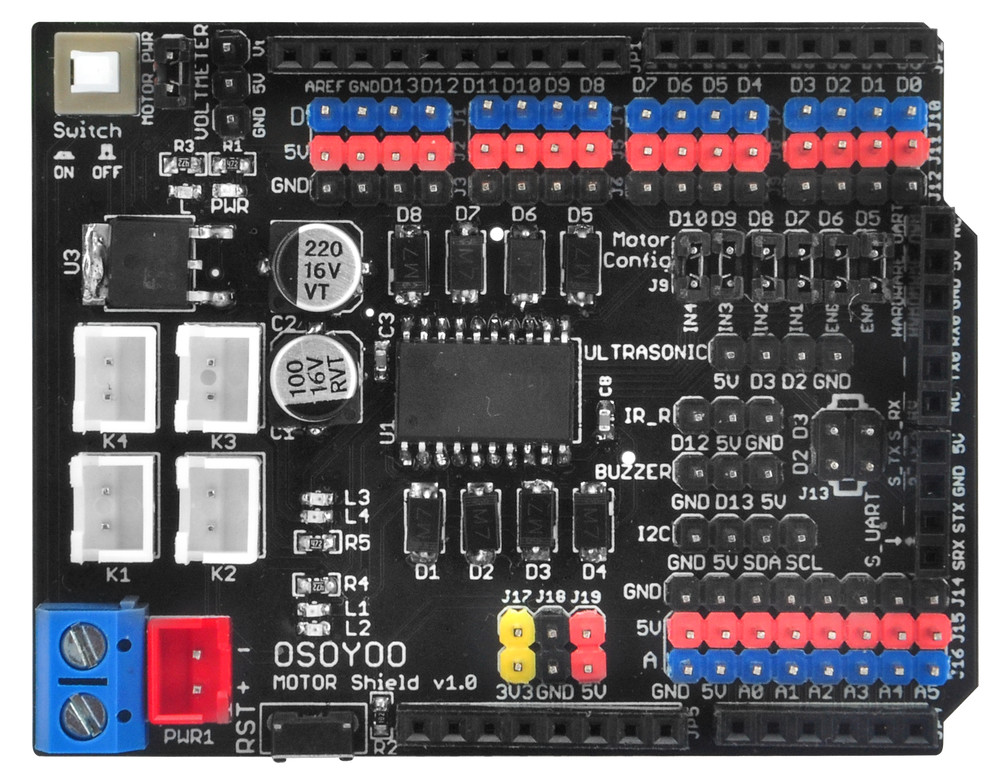
OSOYOO Sport Car Kit for Arduino is an educational and fun kit based on OSOYOO R3 MCU board (Compatible with Arduino) designed for both beginners and professionals to learn electronics, programming and robotics. With our easy-to-follow tutorial, assembling this robot car kit would be very intuitive and simple regardless of whether you are an engineer or a novice. Building up your own robotic project has never been so easy and fun. Just follow our tutorial and step by step you will have your own running car kit within no time.
This kit enables you to have a good quality time with your children and empower them to develop and inspire their imaginations. If your kids, family or friends are attracted to the electronics and robotics world, this kit would be a great choice and perfect gift for them to start their first step on an electronic journey.
having bought and assembled this car about two weeks ago I’m puzzled to find this car slowing down (almost stopping) when turning left (bluetooth) and the voltage meter reading going from 9.0 to 3.something. This also holds true when putting the device on a stand und letting the whells run freely. II’ve checked the wiring and mechanical setup multiple times and couldn’t find any issue. On turning to the right everythings works fine as well as going forward.
Do you have any suggestions what may be the cause for that behavior and how to remedy that?
When your car make left turn, make sure the front wheel is not stuck by the chassis. Sometimes improper installation of the front steering system might cause wheels touching the chassis when making left turn(or right turn). In such cases, the car will consume huge current to overcome the resistance. The voltage will reduce sharply when current is increasing.
If you found that the front left wheel is touching any part of chassis during left turn, you have two solutions:
1) Adjust the screws of the steering system, don’t let the front wheel to touch chassis at any time.
2)Change the code, reduce the left turn angle. For example , original left turn and Sharp_left angles are defined as following:
int LEFT=FRONT-25;
int SHARP_LEFT=FRONT-35;
Please change above value to:
int LEFT=FRONT-20;
int SHARP_LEFT=FRONT-30;
Above code change will reduce the Left turn angle by 5 degree. If the the wheel still touches chassis when left turn, you can change the -20 to -15 and -30 to -25 , then try again.
Thank you very much for providing such detailed insights! I will certainly share this invaluable information with my colleagues and peers, as I believe they will greatly benefit from your expertise.






























having bought and assembled this car about two weeks ago I’m puzzled to find this car slowing down (almost stopping) when turning left (bluetooth) and the voltage meter reading going from 9.0 to 3.something. This also holds true when putting the device on a stand und letting the whells run freely. II’ve checked the wiring and mechanical setup multiple times and couldn’t find any issue. On turning to the right everythings works fine as well as going forward.
Do you have any suggestions what may be the cause for that behavior and how to remedy that?
With Kind Regards
Jochen Seidel
hi, Jochen,
When your car make left turn, make sure the front wheel is not stuck by the chassis. Sometimes improper installation of the front steering system might cause wheels touching the chassis when making left turn(or right turn). In such cases, the car will consume huge current to overcome the resistance. The voltage will reduce sharply when current is increasing.
If you found that the front left wheel is touching any part of chassis during left turn, you have two solutions:
1) Adjust the screws of the steering system, don’t let the front wheel to touch chassis at any time.
2)Change the code, reduce the left turn angle. For example , original left turn and Sharp_left angles are defined as following:
int LEFT=FRONT-25;
int SHARP_LEFT=FRONT-35;
Please change above value to:
int LEFT=FRONT-20;
int SHARP_LEFT=FRONT-30;
Above code change will reduce the Left turn angle by 5 degree. If the the wheel still touches chassis when left turn, you can change the -20 to -15 and -30 to -25 , then try again.
Hope this helps.
Thank you very much for providing such detailed insights! I will certainly share this invaluable information with my colleagues and peers, as I believe they will greatly benefit from your expertise.