En este tutorial, utilizaremos un sensor de seguimiento de 5 líneas para guiar al Robot OSOYOO Auto Deportivo para Arduino para que se mueva automáticamente a lo largo de la línea de seguimiento negra con el fondo blanco. El software de esta lección leerá los datos de los sensores de seguimiento y guiará automáticamente al auto para que se mueva a lo largo de la línea de seguimiento negra en el fondo blanco.
¡El sensor de seguimiento IR de 5 canales OSOYOO es una matriz de 5 sensores IR que se configuran y leen como bits digitales! Puede adaptarse a muchos entornos complejos, los usuarios pueden ajustar el potenciómetro de sensibilidad incorporado de acuerdo con la situación real para modificar el umbral de disparo, que detecta cambios en el ángulo de la curva. La sonda de seguimiento infrarroja de 5 canales integrada puede detectar simultáneamente la línea de seguimiento central y detectar los bordes izquierdo y derecho. Podemos instalarlo en el Robot inteligente con tornillos o remaches para completar el seguimiento de alta precisión.
Para obtener más información sobre el sensor, consulte este enlace:
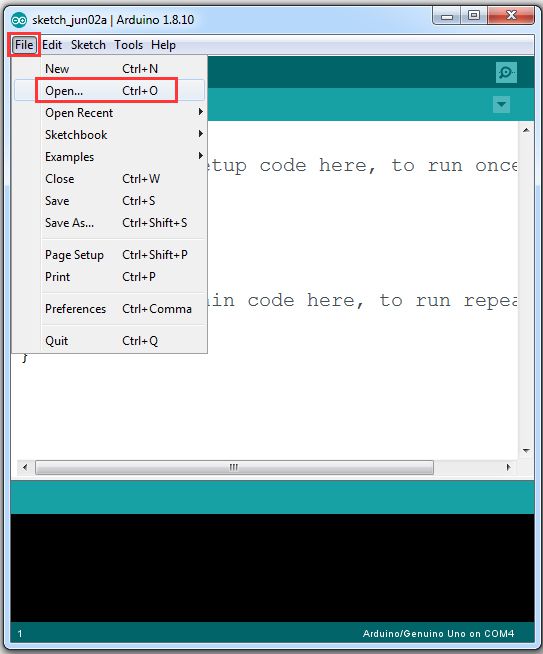
Paso 1: instale el IDE Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.8.19, omita este paso). Descargue el IDE Arduino desde https://www.arduino.cc/en/software, luego instale el software. Paso 2: descargue el código de muestra de la lección 3 , descomprima el archivo zip sg90car-lesson3.zip, luego verá una carpeta llamada sg90car-lesson3. Paso 3: conecte la placa Arduino UNO R3 a la PC con un cable USB, abra el IDE Arduino -> haga clic en Archivo -> haga clic en Abrir -> elija el código “sg90car-lesson3.ino” en la carpeta
sg90car-lesson3, luego cargue el código en la placa básica OSOYOO para Arduino . Aviso: apague la batería o desconecte el adaptador de corriente cuando cargue el código en la placa básica OSOYOO para Arduino.
Paso 4: cambie el valor predeterminado 90 en la línea 22 como el valor FRONT en la Lección 1. Si está alineada la dirección de la rueda manualmente como la opción 1 en el Paso 5 de la Lección 1 , omita este paso.
#define FRONT 90 // dirección al frente
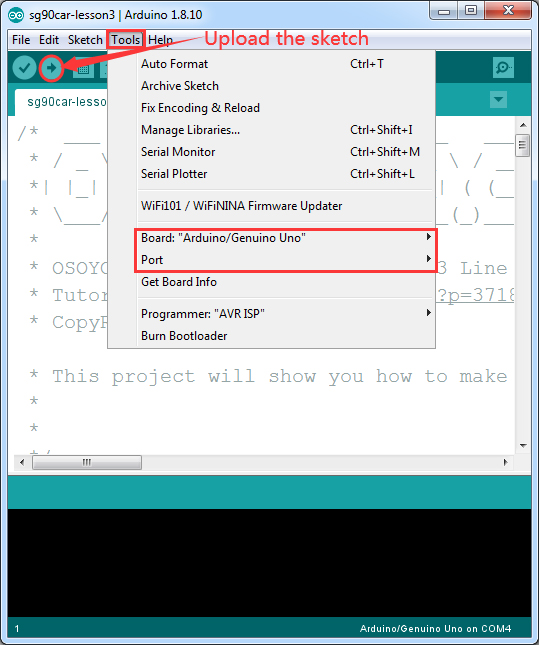
Paso 5: elija la placa/puerto correspondiente para su proyecto, cargue el código en la placa.
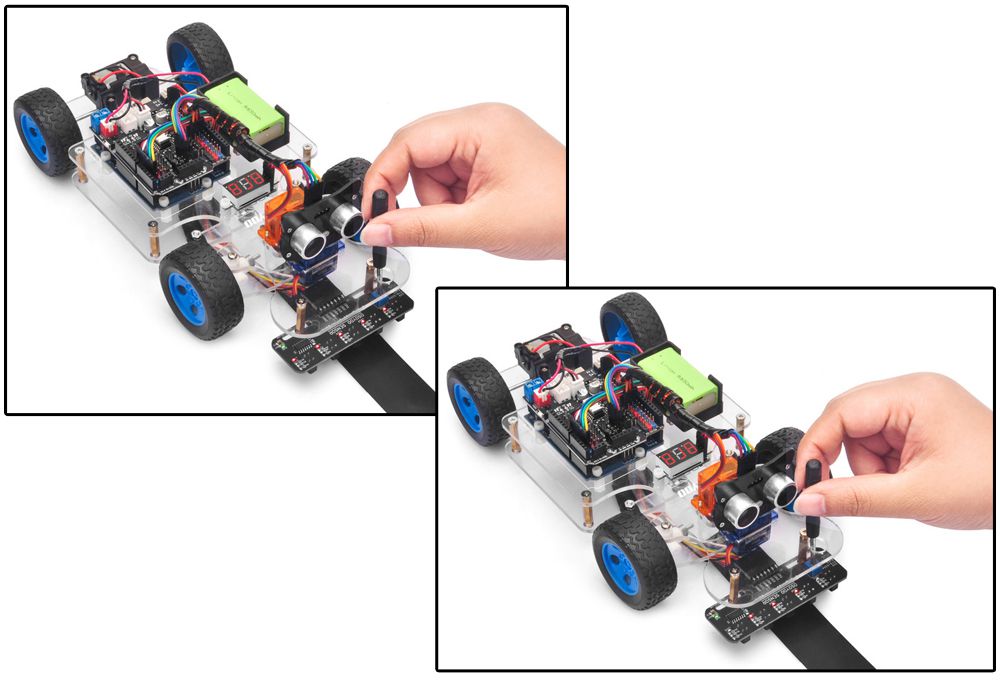
Paso 6: ajuste la sensibilidad de los módulos del sensor de seguimiento.
Encienda y sostenga el Robot y ajuste el potenciómetro en el sensor de seguimiento con un destornillador cruzado hasta que obtenga el mejor estado de sensibilidad: la señal indica que la luz LED se apagará cuando el sensor esté sobre el suelo blanco, y la señal LED se encenderá cuando el sensor está por encima de la pista negra.
Pruebas finales
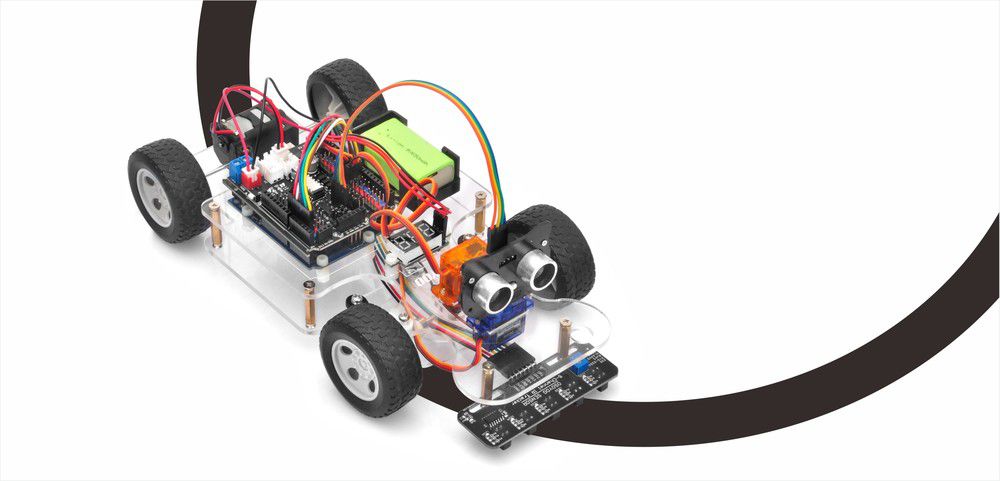
1. Prepare una pista negra (el ancho de la pista negra es más de 20 mm y menos de 30 mm) en fondo blanco. Tenga en cuenta que el ángulo de curvatura de la pista no puede ser superior a 30 grados. Si el ángulo es demasiado grande, el Robot se saldrá de la pista.
2. Desconecte la placa básica OSOYOO para Arduino de la PC y confirme que el interruptor de encendido del escudo OSOYOO Motor V1.1 esté apagado, luego coloque una batería de 9V en la caja de la batería. (Nota: asegúrese de que la dirección de la batería sea correcta, de lo contrario, puede destruir su dispositivo y provocar un riesgo de incendio) .
3. Coloque el Robot en la pista, encienda el interruptor del escudo OSOYOO Motor V1.1, el auto se moverá a lo largo de la pista negra. Nota: Si el Robot no se mueve según el resultado mencionado anteriormente, debe verificar la conexión del cable del sensor de seguimiento, el voltaje de la batería (debe ser superior a 7,2 V).
4. Si desea cambiar el giro de la derecha o la izquierda, edite la línea 23 a 26 del código y vuelva a cargar el código: (Nota: el giro no se puede configurar en más de 35)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
int RIGHT=FRONT+20;
int LEFT=FRONT-20;
5. Si desea cambiar la velocidad del Robot, revise el siguiente código: ( Nota: el valor máximo es 255 )