


I. Objetivo
II.Partes y Dispositivos
III. Instalación de Hardware
IV. Instalación de Software
V.Cómo Utilizar

| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

En esta lección realizaremos un proyecto de conducción autónoma con seguimiento de línea. Añadiremos un módulo sensor de seguimiento de 5 puntos al coche robótico construido en la Lección 1. El software de esta lección leerá los datos del módulo sensor de seguimiento de 5 puntos y guiará automáticamente el coche inteligente a lo largo de la línea negra sobre fondo blanco.
Debe completarse la Lección 1 antes de realizar este proyecto de seguimiento de línea.

Componentes:
Chasis de coche robótico con ruedas Mecanum OSOYOO x1
Ruedas y motores OSOYOO x4 (ruedas izquierdas x2 / ruedas derechas x2)
Placa Raspberry Pi 4/5 (no incluida en el kit)
Shield OSOYOO PWM HAT x1
Placa controladora OSOYOO Model Y x1
Voltímetro OSOYOO x1
Módulo sensor de seguimiento de 5 puntos OSOYOO x1
Portapilas OSOYOO x1
Cable jumper hembra-hembra de 3 pines OSOYOO x1
Cables jumper hembra-hembra de 6 pines OSOYOO x2
Cable jumper hembra-hembra de 7 pines OSOYOO x1
Cable XH2.54 hembra-hembra de 2 pines OSOYOO x1
Pilas 18650 (3.7V) x2
Cargador de pilas x1

Paso 0. Mantener intactas todas las conexiones de la Lección 1. (Advertencia: No retire ningún cable preinstalado de la Lección 1).
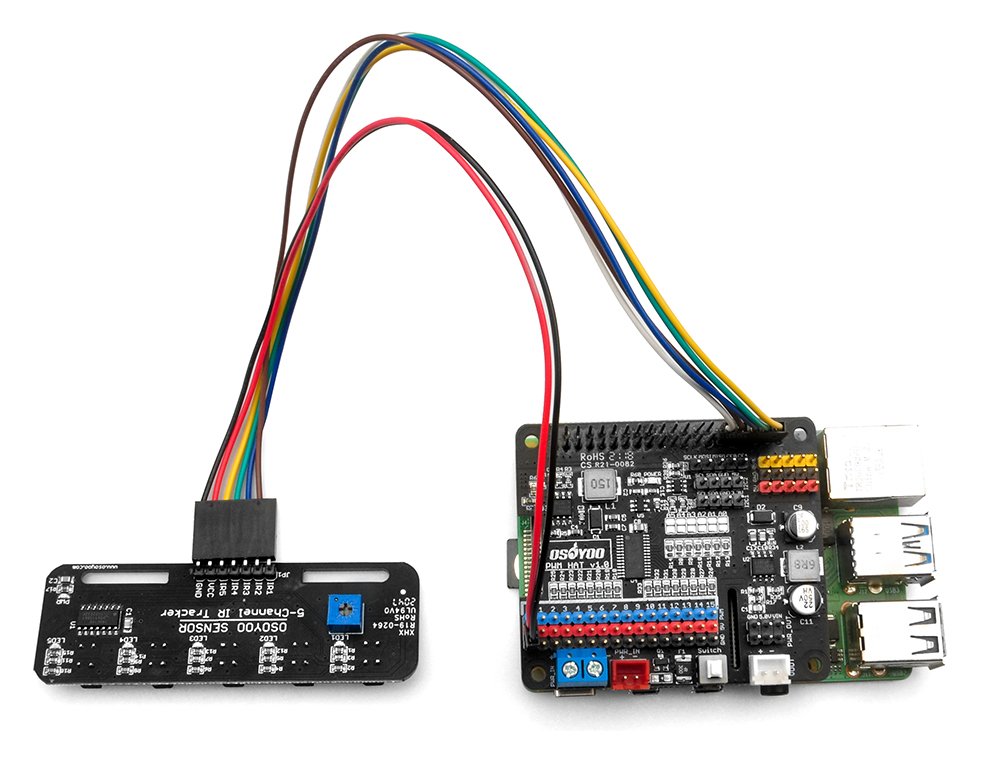
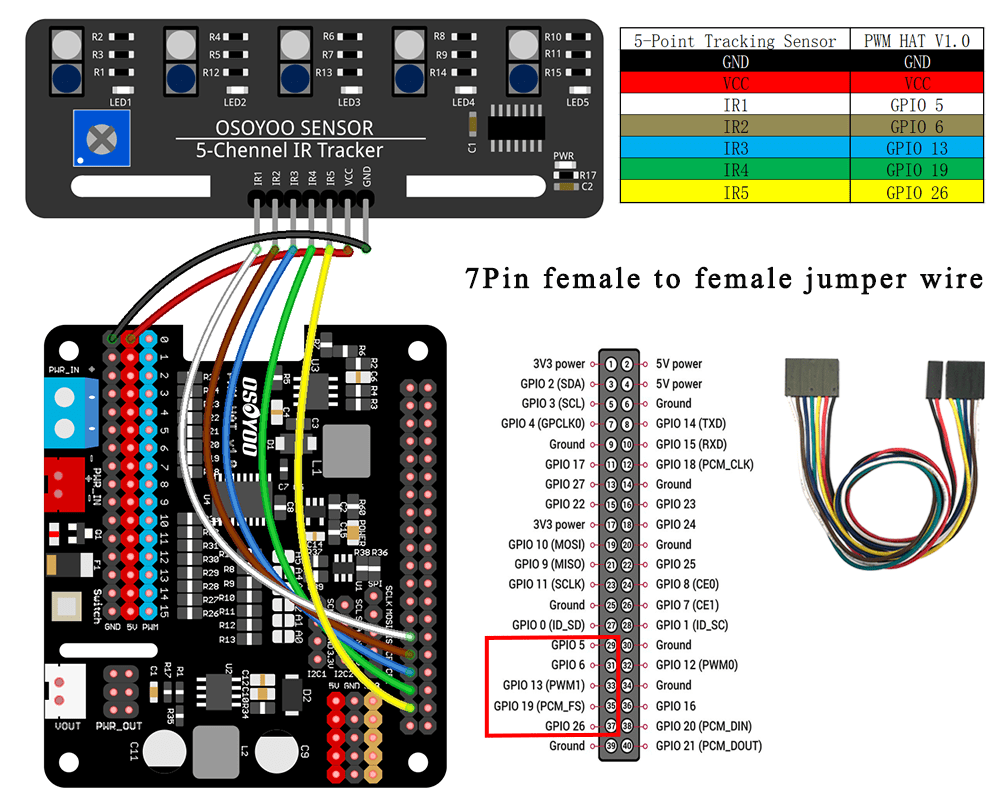
Paso 1. Conecte los pines GND y VCC del módulo sensor de seguimiento a los pines GND y 5V del shield OSOYOO PWM HAT respectivamente. Luego enlace los pines IR1-IR5 a GPIO5, GPIO6, GPIO13, GPIO16 y A1 utilizando un cable F/F de 7 pines de 25 cm, como se muestra en la foto a continuación.
 Paso 2. Ajustar la sensibilidad del sensor de seguimiento:
Paso 2. Ajustar la sensibilidad del sensor de seguimiento:

Ejecute los siguientes comandos:
wget https://osoyoo.com/driver/mecanum/linetracking5.py
python linetracking5.py
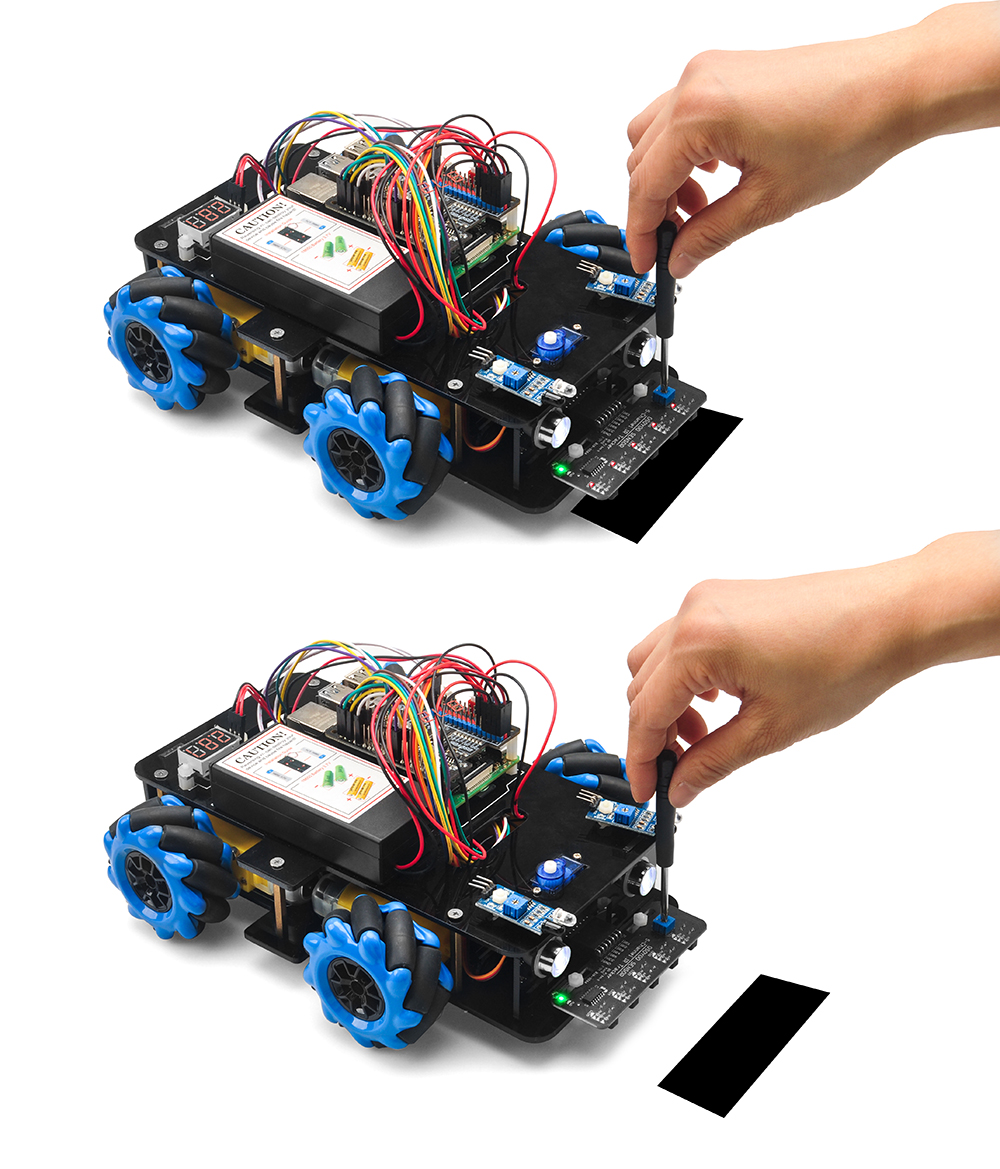
Prueba final:
Preparar una pista negra (ancho 20-30 mm) sobre una superficie clara. Evitar curvas muy cerradas (radio mínimo recomendado: 15 cm) para prevenir que el coche pierda el seguimiento.
Encender el coche y centrar el módulo sensor de seguimiento sobre la línea negra. El coche seguirá entonces la pista de forma autónoma.








