


I. Ziel
II. Teile und Geräte
III.Hardware-Installation
IV. Software-Installation
V. Bedienung

| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

In dieser Lektion führen wir ein Projekt zur linienfolgenden autonomen Steuerung durch. Wir ergänzen das in Lektion 1 gebaute Roboterauto um ein 5-Punkt-Linienverfolgungs-Sensormodul. Die Software dieser Lektion liest Daten vom 5-Punkt-Verfolgungssensormodul und führt das Smart Car automatisch entlang der schwarzen Spurlinie auf weißem Untergrund.
Lektion 1 muss vor diesem Linienverfolgungsprojekt abgeschlossen sein.

Komponenten:
OSOYOO Mecanum-Rad Roboterauto-Chassis x1
OSOYOO Räder und Motoren x4 (Linksräder x2 / Rechtsräder x2)
Raspberry Pi 4/5-Platine (nicht im Kit enthalten)
OSOYOO PWM HAT Shield x1
OSOYOO Model Y Treiberplatine x1
OSOYOO Spannungsmesser x1
OSOYOO 5-Punkt-Linienverfolgungssensormodul x1
OSOYOO Batteriebox x1
OSOYOO 3-poliges Jumperkabel (weiblich-weiblich) x1
OSOYOO 6-polige Jumperkabel (weiblich-weiblich) x2
OSOYOO 7-poliges Jumperkabel (weiblich-weiblich) x1
OSOYOO XH2.54 2-poliges Kabel (weiblich-weiblich) x1
18650-Batterien (3,7V) x2
Batterieladegerät x1

Schritt 0. Alle Verbindungen aus Lektion 1 unverändert belassen. (Warnung: Keine voreingebauten Kabel aus Lektion 1 entfernen).
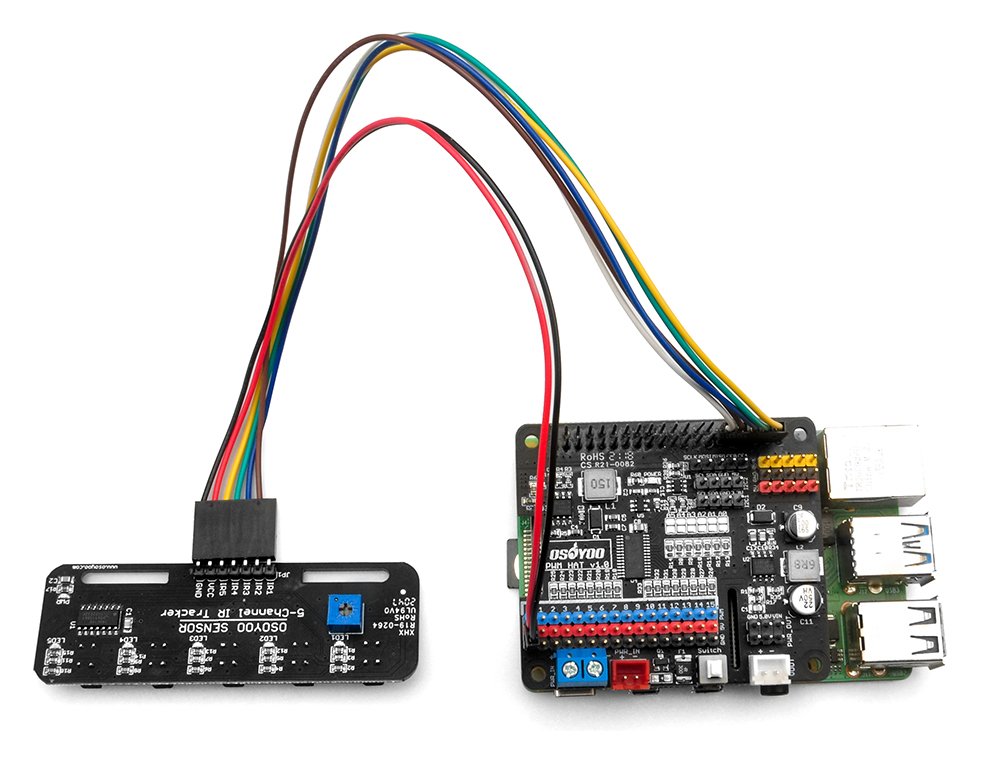
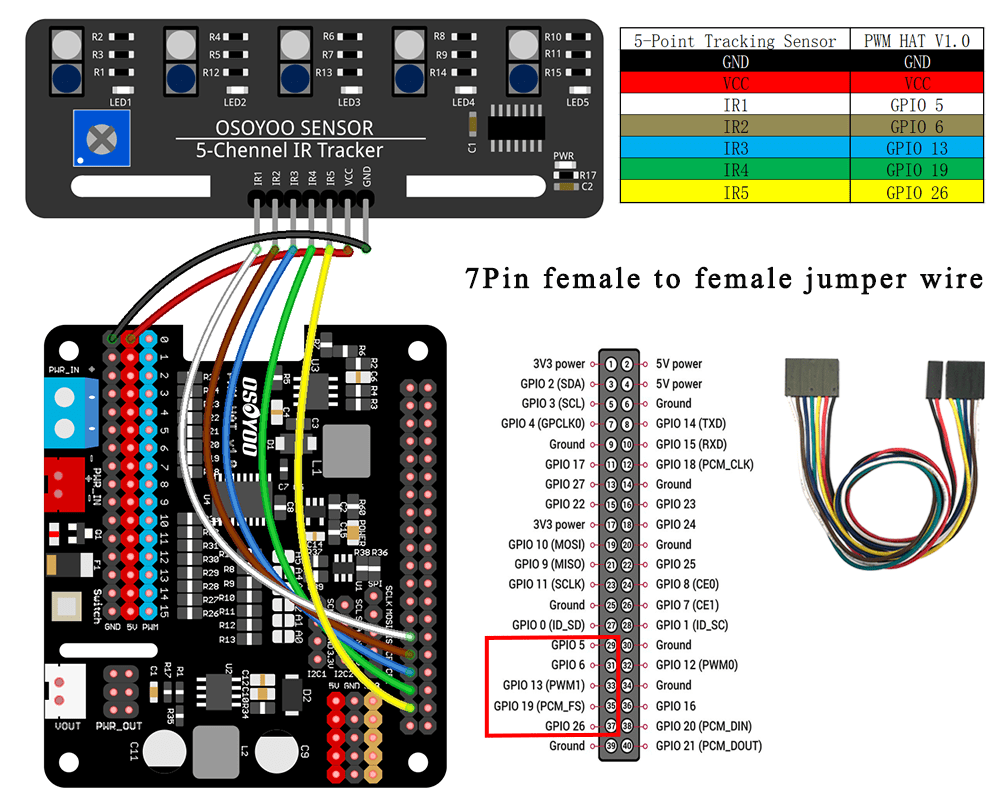
Schritt 1. Verbinden Sie die GND- und VCC-Pins des Linienverfolgungssensormoduls jeweils mit den GND- und 5V-Pins des OSOYOO PWM HAT Shields. Verbinden Sie dann die IR1-IR5-Pins mit GPIO5, GPIO6, GPIO13, GPIO16 und A1 über ein 7-poliges 25-cm-F/F-Kabel, wie auf dem folgenden Foto gezeigt.
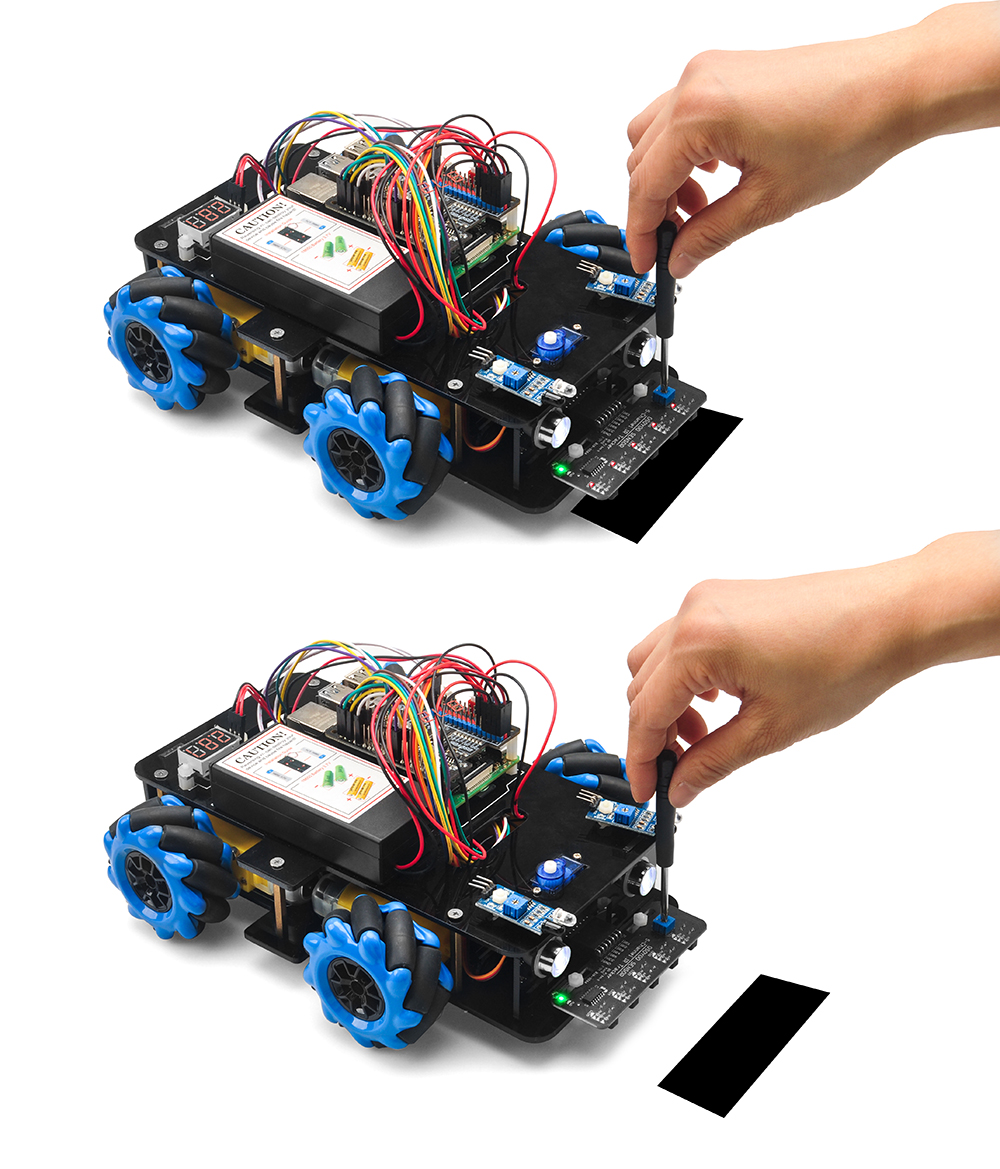
 Schritt 2. Empfindlichkeit des Linienverfolgungssensors einstellen:
Schritt 2. Empfindlichkeit des Linienverfolgungssensors einstellen:
-
Batteriebox einschalten, während das Auto stillgehalten wird.
-
Mit einem Kreuzschlitzschraubendreher das Potentiometer an jedem Linienverfolgungssensor optimal einstellen:

Führen Sie folgende Befehle aus::
wget https://osoyoo.com/driver/mecanum/linetracking5.py
python linetracking5.py
Abschließender Test:
Eine schwarze Spur (20-30 mm Breite) auf einer hellen Oberfläche vorbereiten. Zu scharfe Kurven vermeiden (minimal empfohlener Radius: 15 cm), damit das Auto die Spur nicht verliert.
Auto einschalten und das Linienverfolgungssensormodul mittig über der schwarzen Spur positionieren. Das Auto folgt anschließend der Spur autonom..








