


I. Obiettivo
II. Parti e Dispositivi
III. Installazione Hardware
IV. Installazione Software
V. Come Utilizzare

| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

In questa lezione realizzeremo un progetto di guida autonoma con rilevamento della linea. Aggiungeremo un modulo sensore di tracciamento a 5 punti all’auto robotica costruita nella Lezione 1. Il software di questa lezione leggerà i dati dal modulo sensore di tracciamento a 5 punti e guiderà automaticamente l’auto intelligente lungo la linea nera tracciata su fondo bianco.
È necessario completare la Lezione 1 prima di eseguire questo progetto di tracciamento della linea.

Componenti:
Chassis auto robotica con ruote Mecanum OSOYOO x1
Ruote e motori OSOYOO x4 (ruote sinistra x2 / ruote destra x2)
Scheda Raspberry Pi 4/5 (non inclusa nel kit)
Shield OSOYOO PWM HAT x1
Scheda di controllo OSOYOO Model Y x1
Voltmetro OSOYOO x1
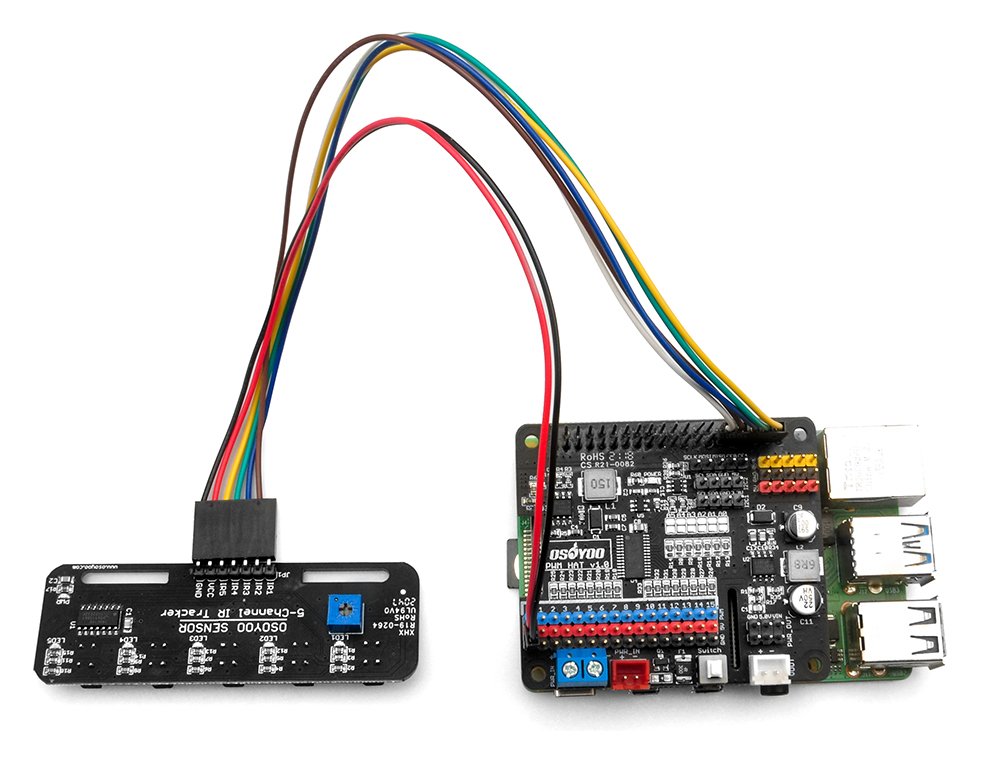
Modulo sensore di tracciamento a 5 punti OSOYOO x1
Portabatterie OSOYOO x1
Cavo jumper femmina-femmina a 3 pin OSOYOO x1
Cavi jumper femmina-femmina a 6 pin OSOYOO x2
Cavo jumper femmina-femmina a 7 pin OSOYOO x1
Cavo XH2.54 femmina-femmina a 2 pin OSOYOO x1
Batterie 18650 (3.7V) x2
Caricabatterie x1

Passo 0. Mantenere tutte le connessioni della Lezione 1 intatte. (Attenzione: non rimuovere alcun cavo preinstallato dalla Lezione 1).
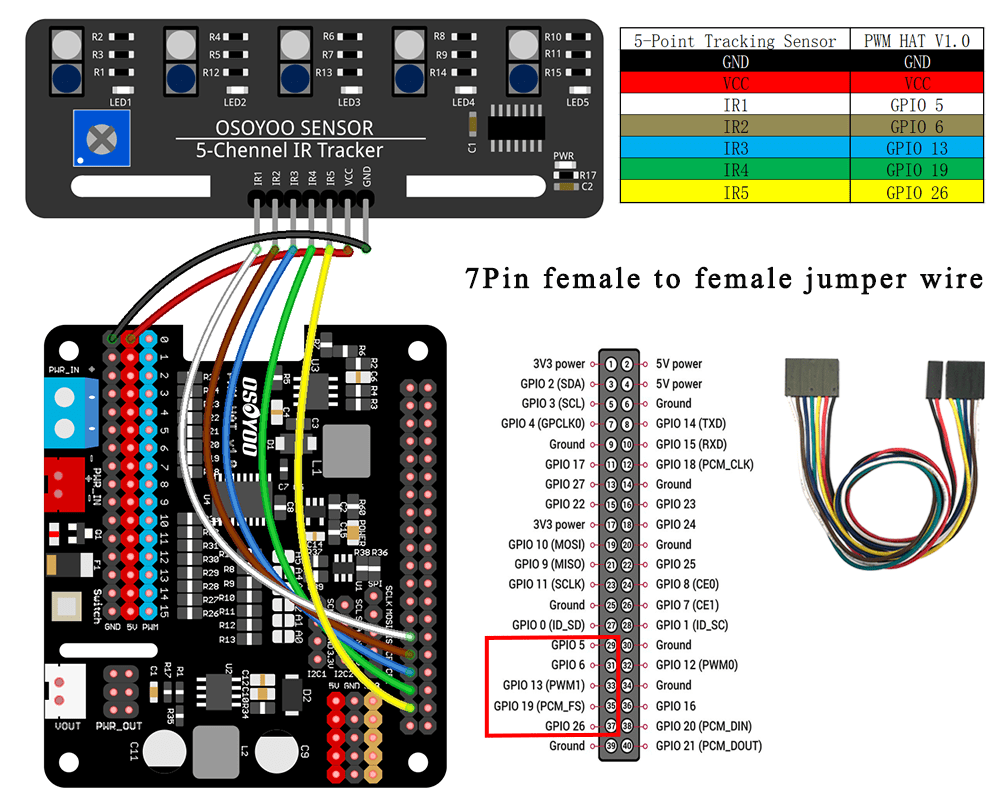
Passo 1. Collegare i pin GND e VCC del modulo sensore di tracciamento rispettivamente ai pin GND e 5V dello shield OSOYOO PWM HAT. Quindi collegare i pin IR1-IR5 a GPIO5, GPIO6, GPIO13, GPIO16 e A1 utilizzando un cavo F/F a 7 pin da 25 cm, come mostrato nella foto sottostante.
 Passo 2. Regolare la sensibilità del sensore di tracciamento:
Passo 2. Regolare la sensibilità del sensore di tracciamento:

Eseguire i seguenti comandi:
wget https://osoyoo.com/driver/mecanum/linetracking5.py
python linetracking5.py
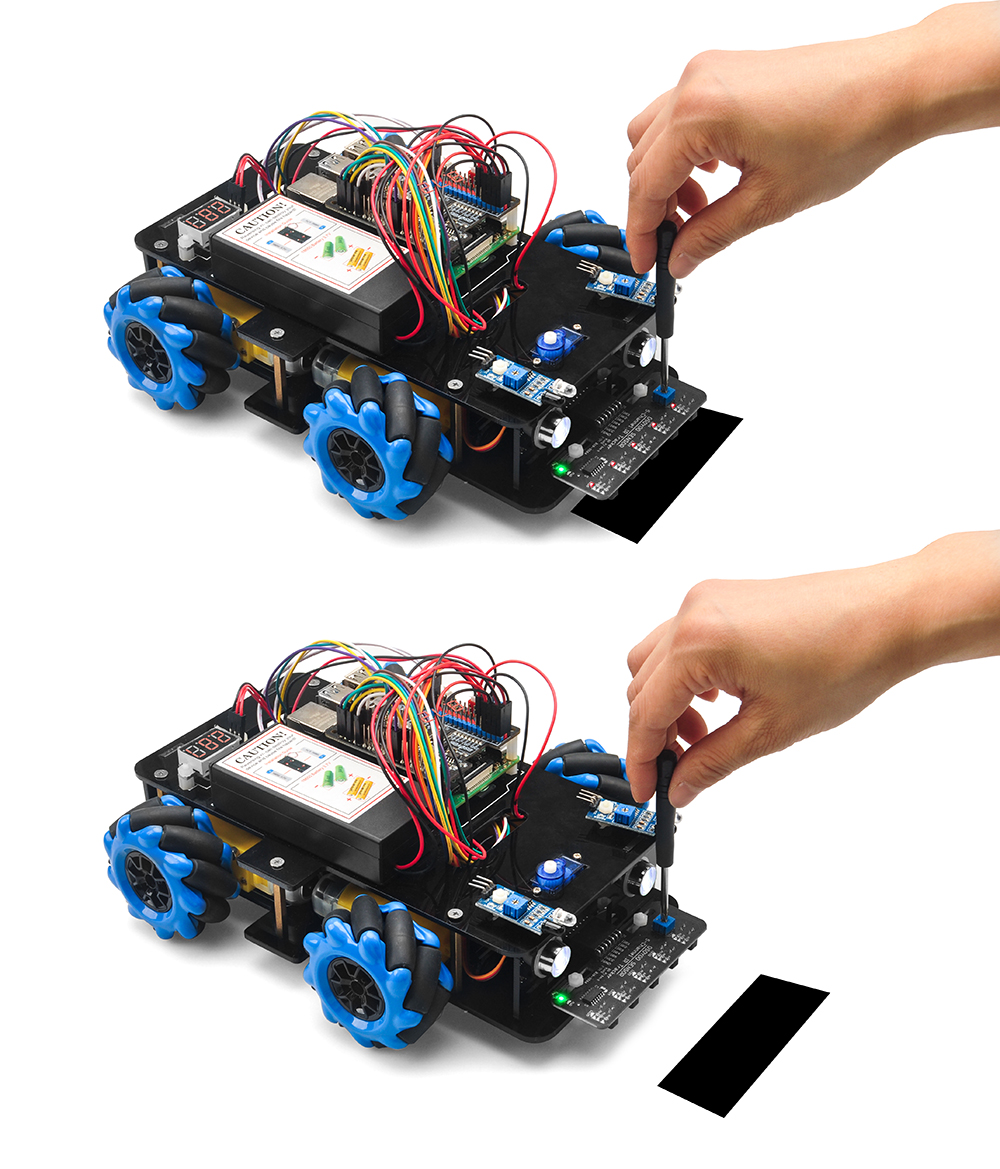
Test Finale:
Preparare una traccia nera (larghezza 20-30 mm) su una superficie di colore chiaro. Evitare curve troppo strette (raggio minimo consigliato: 15 cm) per prevenire la perdita di tracciamento da parte dell’auto.
Accendere l’auto e posizionare il modulo sensore di tracciamento al centro della linea nera. L’auto seguirà quindi la traccia in modo autonomo.








