


I. Objectif
II.Pièces et Appareils
III. Installation Matérielle
IV. Installation Logicielle
V. Comment Utiliser

| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

Dans cette leçon, nous réaliserons un projet de conduite autonome par suivi de ligne. Nous ajouterons un module capteur de suivi à 5 points au robot construit dans la Leçon 1. Le logiciel de cette leçon lira les données du module capteur de suivi à 5 points et guidera automatiquement la voiture intelligente le long du tracé noir sur fond blanc.
La Leçon 1 doit être terminée avant de réaliser ce projet de suivi de ligne.

Composants :
Châssis de voiture robotique à roues Mecanum OSOYOO x1
Roues et moteurs OSOYOO x4 (roues gauche x2 / roues droite x2)
Carte Raspberry Pi 4/5 (non incluse dans le kit)
Shield OSOYOO PWM HAT x1
Carte de contrôle OSOYOO Model Y x1
Voltmètre OSOYOO x1
Module capteur de suivi à 5 points OSOYOO x1
Boîtier à piles OSOYOO x1
Câble jumper femelle-femelle 3 broches OSOYOO x1
Câbles jumper femelle-femelle 6 broches OSOYOO x2
Câble jumper femelle-femelle 7 broches OSOYOO x1
Câble XH2.54 femelle-femelle 2 broches OSOYOO x1
Piles 18650 (3,7V) x2
Chargeur de piles x1

Étape 0. Conserver intactes toutes les connexions de la Leçon 1. (Avertissement : ne retirez aucun câble préinstallé de la Leçon 1).
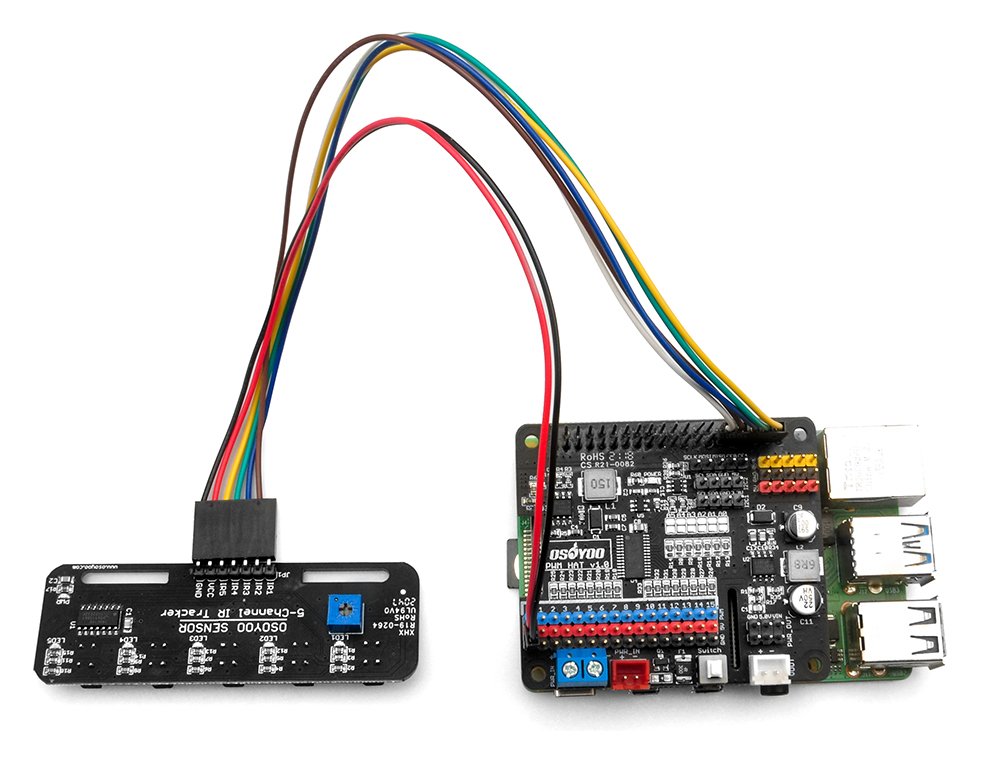
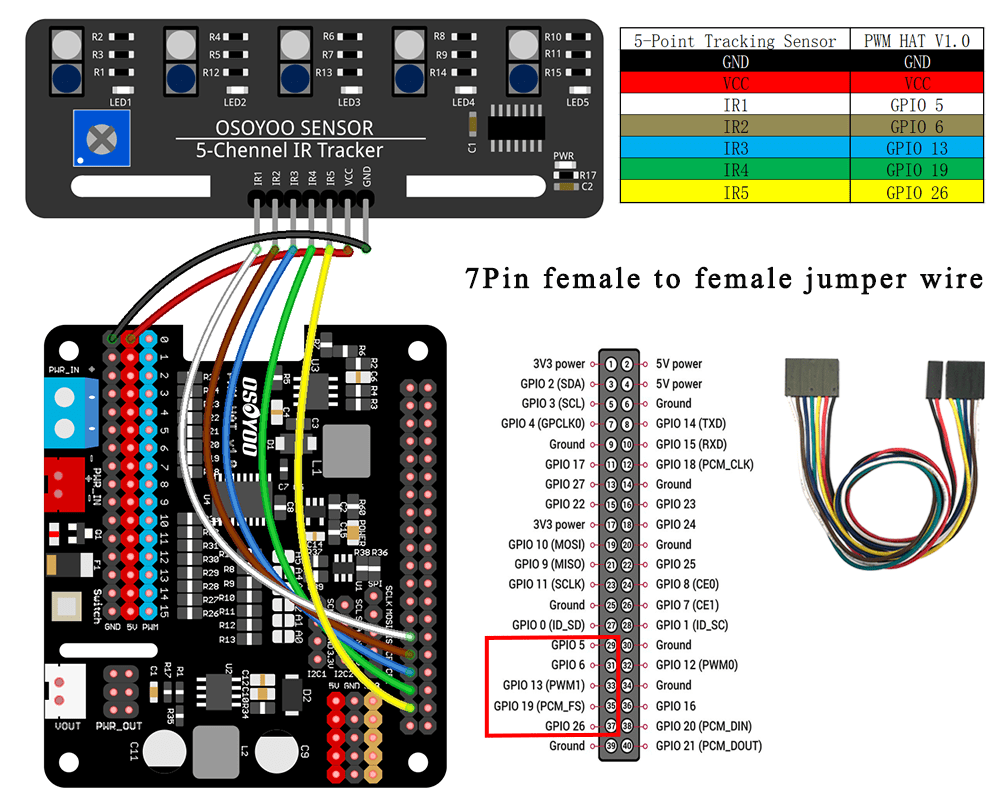
Étape 1. Connectez les broches GND et VCC du module capteur de suivi respectivement aux broches GND et 5V du shield OSOYOO PWM HAT. Puis reliez les broches IR1-IR5 à GPIO5, GPIO6, GPIO13, GPIO16 et A1 à l’aide d’un câble F/F 7 broches de 25 cm, comme indiqué sur la photo ci-dessous.
 Étape 2. Régler la sensibilité du capteur de suivi
Étape 2. Régler la sensibilité du capteur de suivi

Exécutez les commandes suivantes :
wget https://osoyoo.com/driver/mecanum/linetracking5.py
python linetracking5.py
Test final :
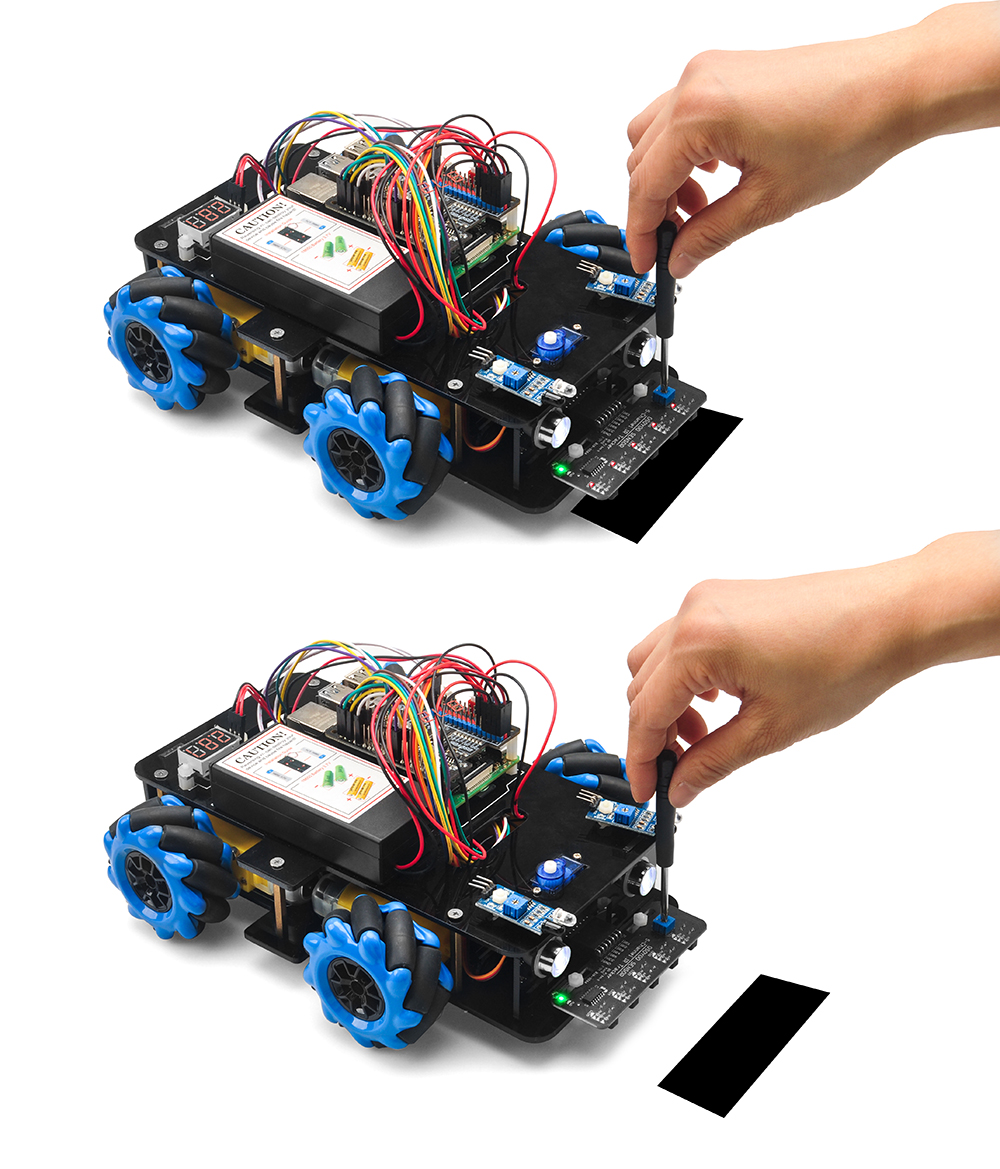
Préparer un tracé noir (largeur 20-30 mm) sur une surface claire. Éviter les virages serrés (rayon minimal recommandé : 15 cm) pour empêcher la voiture de perdre le suivi.
Allumer la voiture et centrer le module capteur de suivi sur la ligne noire. La voiture suivra alors la piste de manière autonome.








