Dans cette leçon, nous installerons 2 capteurs de distance IR sur la voiture robot et nous programmerons la voiture pour qu’elle suive les mouvements des objets. Le principe de cette expérience est basé sur le principe de détection de la distance infrarouge. La voiture reçoit le signal des capteurs de distance à infrarouge, puis le programme la guide dans ses actions.
Vous devez avoir terminé la leçon 1 (assemblage de la voiture) avant de continuer avec cette leçon.
Pièces et dispositifs:
Nombre
Photo
Dispositif
Quatité
Accessoires
Acheter en lien
1
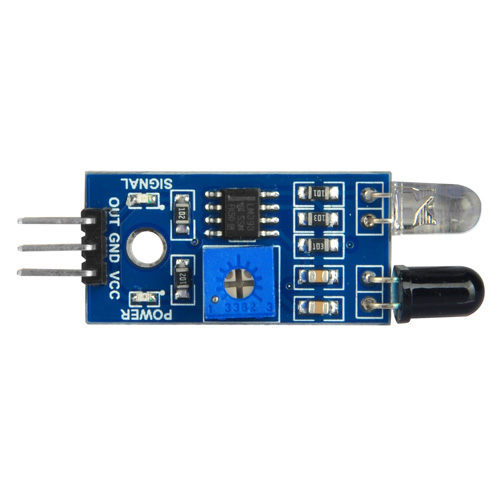
Capteur de distance IR
2
Vis en plastique M3 x 2
Pilier en plastique M3 x 2
Ecrou plastique M3 x 2
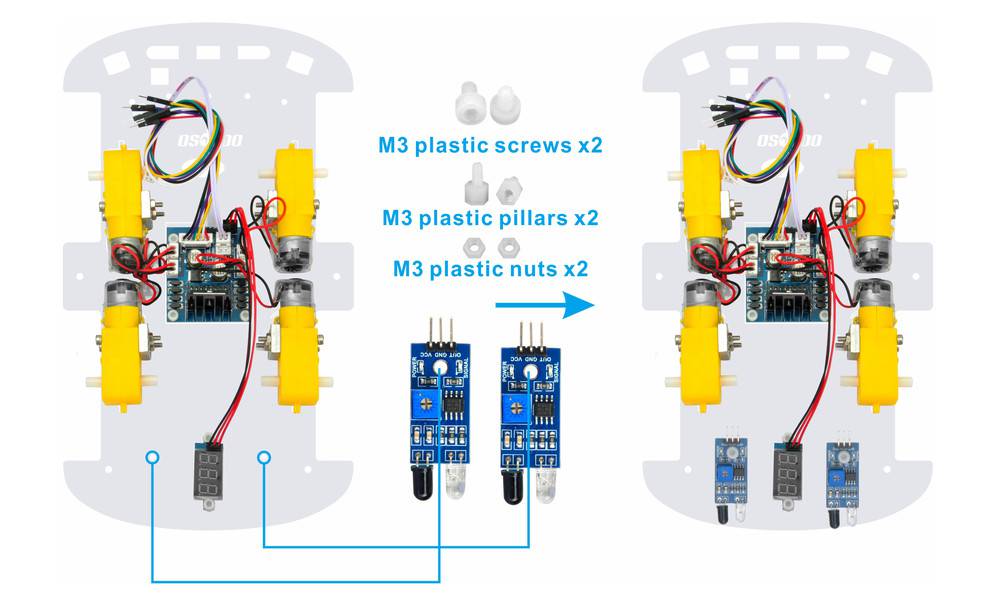
Étape 1: Installer la structure de base de la voiture intelligente selon les instructions suivantes Leçon 1 sur la voiture intelligente. Si vous avez déjà effectué l’installation dans la leçon 1, conservez-la telle quelle..
Étape 2: Retirez les vis sur les piliers en cuivre et ajoutez 2 capteurs de distance IR sur la voiture. Installez les capteurs de distance IR à l’aide de 2 vis plastiques M3, de piliers plastiques M3 et d’écrous plastiques M3 à l’arrière du châssis bas de la voiture.
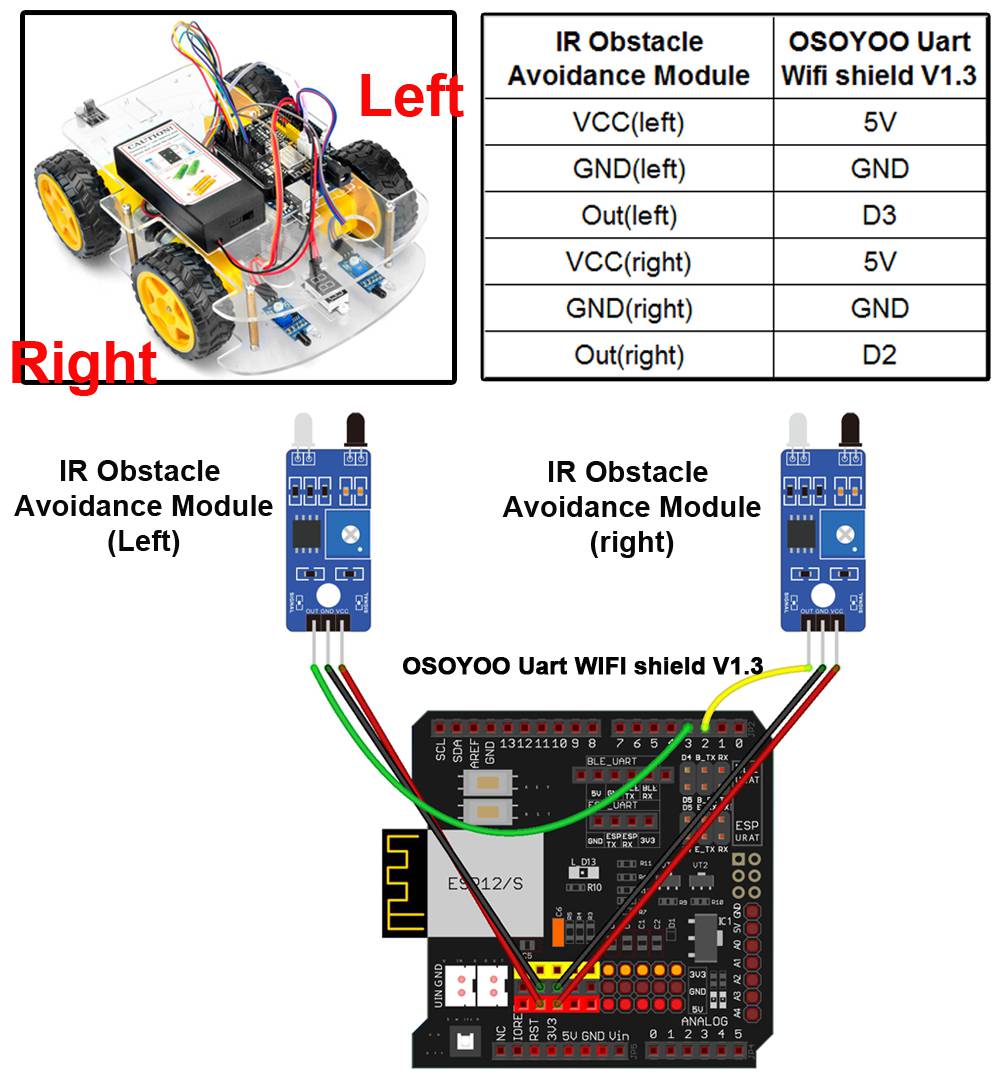
Étape 3: Connectez 2 modules de capteurs de distance IR comme indiqué dans le diagramme de connexion ci-dessous (N’oubliez pas : NE supprimez PAS les câbles existants installés dans la leçon 1) :
Étape 4: Fixer les vis sur les piliers en cuivre pour relier le châssis supérieur au châssis inférieur.
Étape 1: Installer la dernière version de l’IDE (Si vous avez une version de l’IDE postérieure à 1.1.16, veuillez sauter cette étape). Télécharger l’IDE à partir de https://www.arduino.cc/en/Main/Software?setlang=en , puis installer le logiciel.
Étape 2: Téléchargez l’exemple de code de la leçon 3 à partir de https://osoyoo.com/driver/v2smartcar-lesson3.zip , décompressez le fichier zip de téléchargement v2smartcar-lesson3.zip, vous verrez un dossier appelé v2smartcar-lesson3 .
Étape 3: Connecter la carte OSOYOO basic au PC avec un câble USB, ouvrir l’IDE Arduino -> cliquer sur file -> cliquer sur Open -> choisir le code “v2smartcar-lesson3.ino” dans le dossier v2smartcar-lesson3, charger le code dans votre carte.
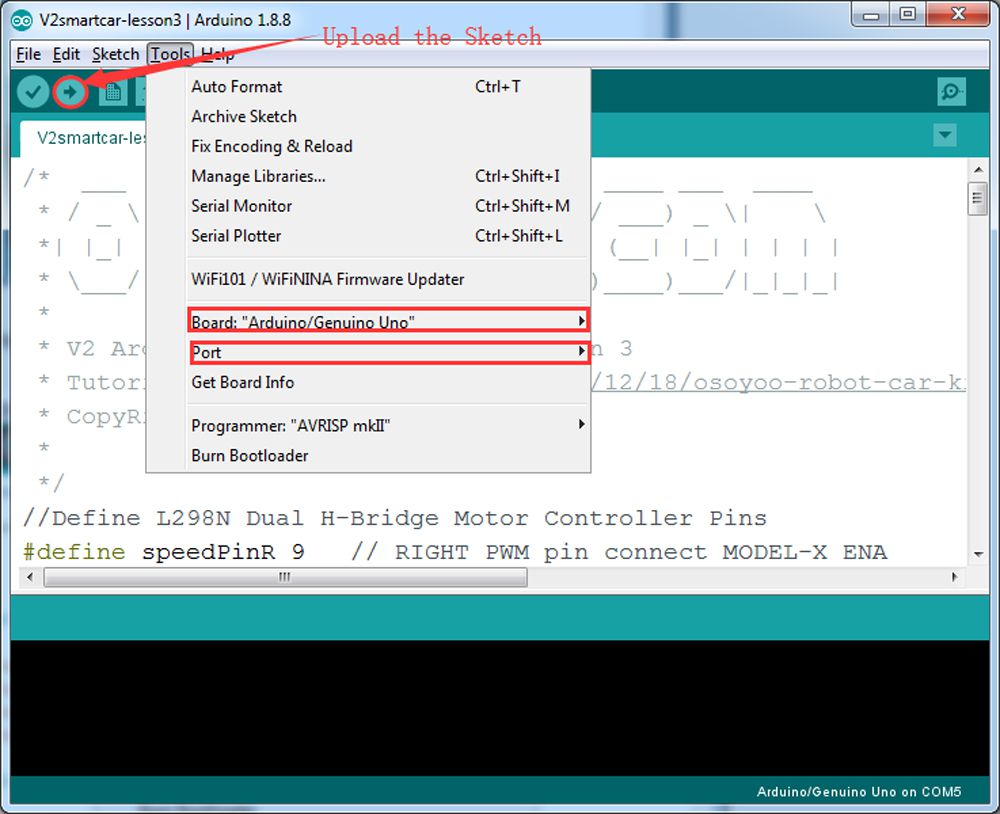
Étape 4: Choisissez la carte/le port correspondant à votre projet, téléchargez l’esquisse sur la carte.
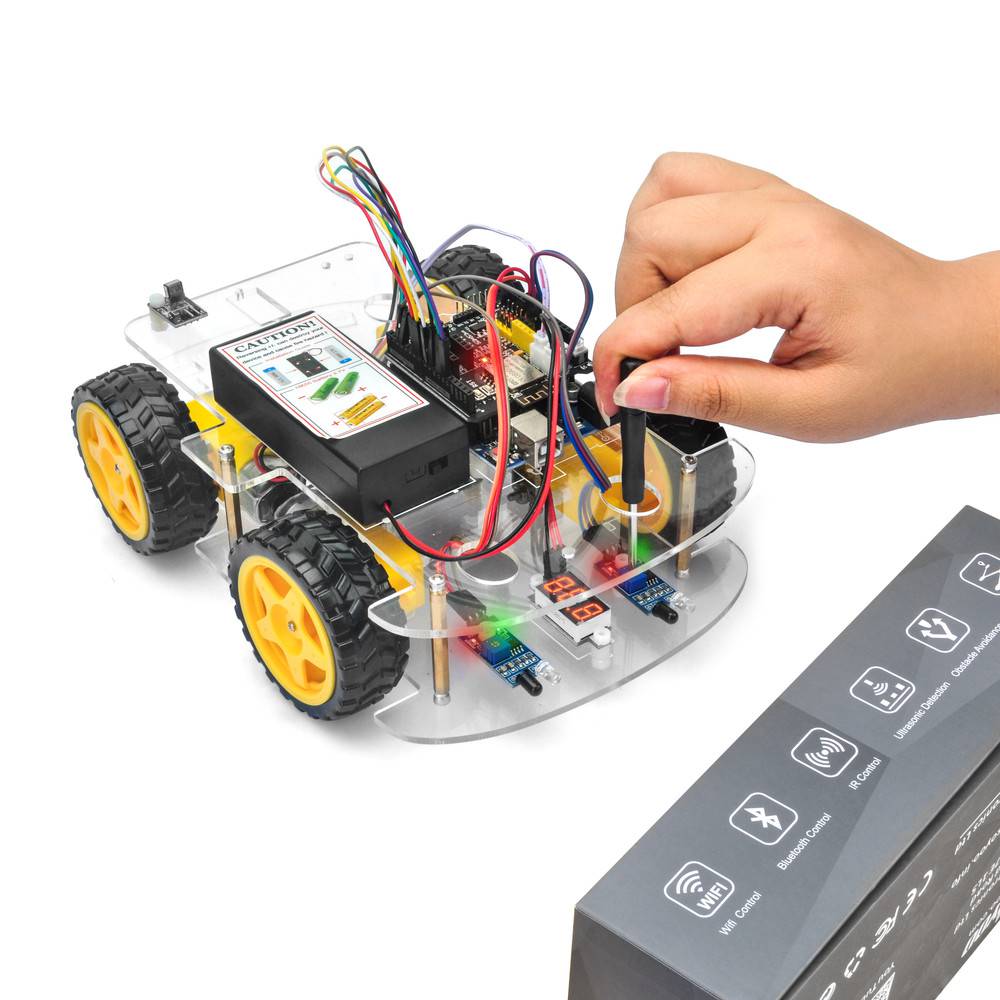
Étape 5: Allumez la voiture, placez l’objet à environ 10 cm devant chaque capteur de distance IR et réglez le potentiomètre des capteurs de distance IR pour détecter l’objet ou votre main.
Remarque : lorsque ces modules détectent des objets, l’indicateur d’alimentation et l’indicateur de signal sont allumés. Lorsque vous déplacez l’objet au-delà de la distance de détection, l’indicateur d’alimentation s’allume. Si l’indicateur de signal est toujours allumé alors que l’objet a dépassé la distance de détection, vous devez également régler le potentiomètre.
Essais:
Allumez la voiture, déplacez un objet ou votre main devant la voiture, et la voiture se déplacera en conséquence : c’est comme si vous la tiriez. Elle avance lorsque les deux modules IR de prévention des obstacles détectent l’objet ou votre main ; elle tourne à droite lorsque les modules IR de prévention des obstacles de droite détectent l’objet ; elle tourne à gauche lorsque les capteurs de distance IR de gauche détectent l’objet.
Lorsque l’objet ou votre main se trouve à plus de 10 cm, il s’arrête.
Remarque :
1) Les modules de capteurs de distance IR étant installés à l’arrière de la voiture, toutes les directions de mouvement sont contraires aux autres parcours.
2) La voiture ne peut qu’avancer, tourner à droite et à gauche, mais ne peut pas reculer.
No matter how far I turn the potentiometer or distance from the sensor to an object, I cannot get the left sensor to light the green LED. The right sensor works as it is supposed to. I swapped the wires and then the left worked and the right did not, so I suspect it is a bad sensor.
I looked in the accessories / sensors section but I did not see the IR Object Avoidance sensors listed.
I just finished installing the Lesson 2 and uploaded the software. When i turned ON the Robot car, i noticed that the tires were running continuously.
Please what could be the reason for this?
First, this is a really great robot kit. Love to play with it. If someone would try, you could improve the object following if you add the ultrasonic module between the two obstacle sensors. It fits but is a bit fiddeling. So you can set the motorspeed according to the distance the ultrasonic sensor reads. You can get a much smoother following. Also it increases the range, ultraconic sensor can detect your hand or whatever in a much greater distance. Try it Is really great fun..
I have received my kit, got as far as lesson 3 but the right IR unit is faulty. When adjusting the potentiometer the green light comes on and stays on with no object near the sensor, at any other point on the potentiometer the green light goes off even with an object infront of it. The left unit works as it should.
elaine its not working both the sensors are showing that there powered but no matter how much i adjust them they do show that there getting a signal what do i do please help



















Hello, the object sensors are very weak. I have to put a paper about 2 cm to the car to detect it. Any suggestions ?
you can adjust the sensitivity potentiometer with a screwdriver. see this https://osoyoo.com/picture/V2.1_Arduino_Robot_Car/Lesson3/3.jpg
No matter how far I turn the potentiometer or distance from the sensor to an object, I cannot get the left sensor to light the green LED. The right sensor works as it is supposed to. I swapped the wires and then the left worked and the right did not, so I suspect it is a bad sensor.
I looked in the accessories / sensors section but I did not see the IR Object Avoidance sensors listed.
Can someone please help me order replacements?
Oh, good grief. Never mind. I completely failed to notice the “click here to buy” link next to the parts list above.
OK, If you get any issue, please contact me again. Thanks.
Hi,
I just finished installing the Lesson 2 and uploaded the software. When i turned ON the Robot car, i noticed that the tires were running continuously.
Please what could be the reason for this?
Kelvin.
Does the saftware notice successfully?
Pleas confirm you download the lesson 2 IR remote car or this commented lesson(lesson3).
First, this is a really great robot kit. Love to play with it. If someone would try, you could improve the object following if you add the ultrasonic module between the two obstacle sensors. It fits but is a bit fiddeling. So you can set the motorspeed according to the distance the ultrasonic sensor reads. You can get a much smoother following. Also it increases the range, ultraconic sensor can detect your hand or whatever in a much greater distance. Try it Is really great fun..
Thank you. Your interest and support make us progress
I have received my kit, got as far as lesson 3 but the right IR unit is faulty. When adjusting the potentiometer the green light comes on and stays on with no object near the sensor, at any other point on the potentiometer the green light goes off even with an object infront of it. The left unit works as it should.
Please provide your order No. and address, I’ll send the IR to you ASAP.
I have had this same problem have you managed to sort it out or is a new part needed?
elaine its not working both the sensors are showing that there powered but no matter how much i adjust them they do show that there getting a signal what do i do please help
Is one of the sensers suppose to have gunk on it?
Why do you ask such question? Our sensors should be brand new and clean in the package.