Dans cette leçon, nous allons utiliser Mobile pour contrôler notre voiture robot et faire une imitation de conduite. Comme il s’agit d’une conduite simulée, nous utiliserons un volant virtuel et un équipement dans notre application pour imiter leurs homologues dans la vraie voiture.
Étape 1 : Installez le cadre de base de la voiture intelligente conformément à la leçon 2. Si vous avez déjà terminé l’installation dans la leçon 1, conservez-la telle quelle.
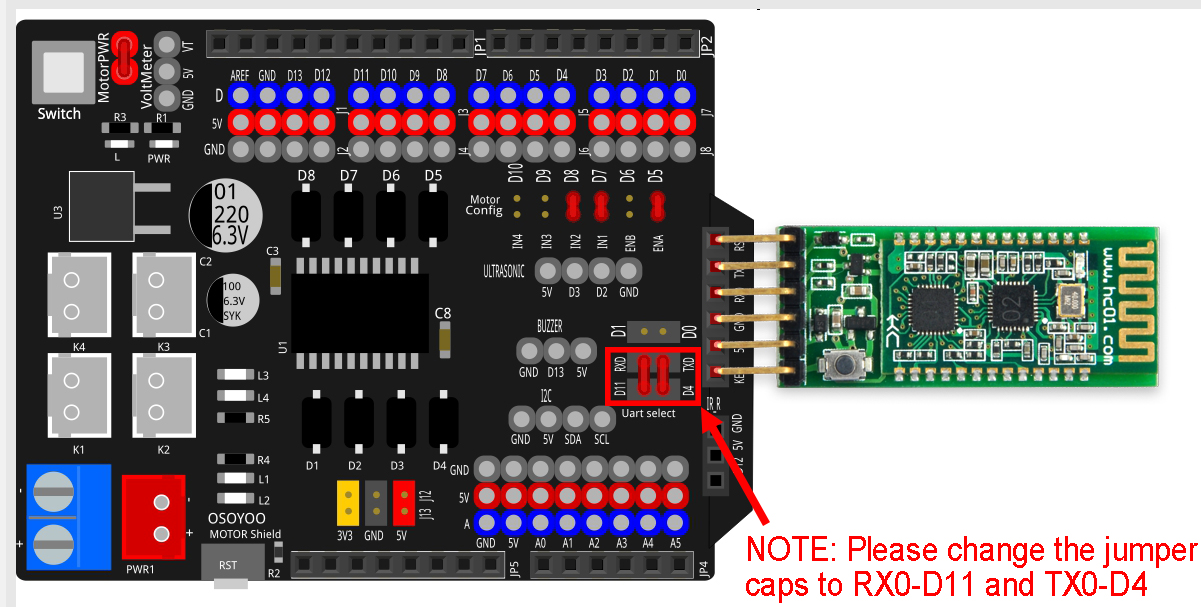
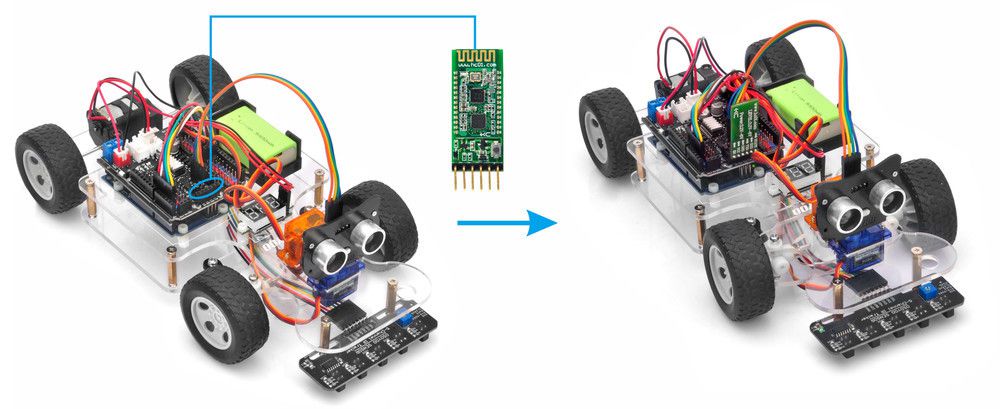
Étape 2 : Insérez le module Bluetooth dans l’emplacement Bluetooth du blindage moteur OSOYOO comme graphique suivant (rappelez-vous : NE PAS retirer les fils existants installés dans la leçon 1) :
Recherchez « OSOYOO imitation driving » dans
Google Play ou Apple APP store
(Note : Si vous ne trouvez pas cette APP dans Google Play,
vous pouvez directement télécharger l’APP à partir du lien suivant : https://osoyoo.com/test/mockdrive.apk)
Étape 1 : Veuillez télécharger la bibliothèque PWMServo à partir de https://osoyoo.com/driver/sg90car/PWMServo.zip, puis importer la bibliothèque dans Arduino IDE. Si vous avez terminé la leçon 2, veuillez ignorer cette étape.
Étape 2 : Téléchargez l’exemple de code de la leçon 6. Décompressez le fichier téléchargé, vous verrez un dossier appelé sg90car-lesson6B.
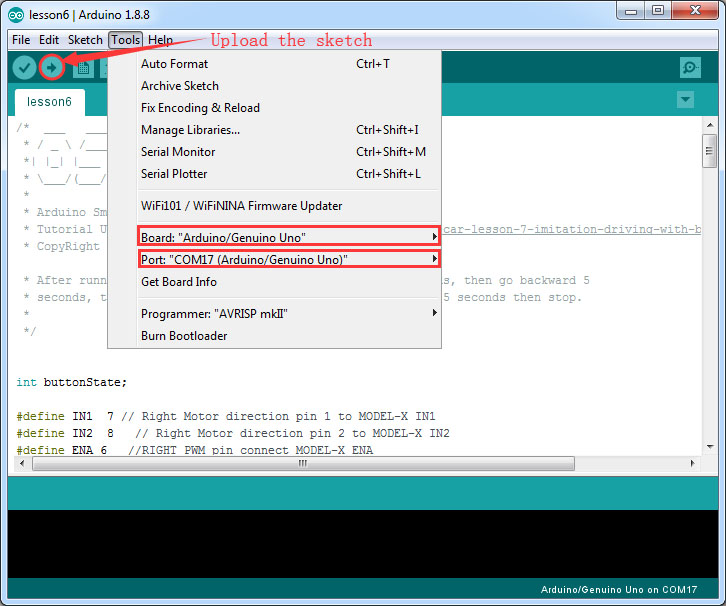
Étape 3 : Connectez OSOYOO Basic Board for Arduino au PC avec un câble USB, ouvrez Arduino IDE → cliquez sur fichier → cliquez sur Ouvrir → choisissez le code « sg90car-lesson6B.ino » dans le dossier sg90car-lesson6B, chargez le code dans OSOYOO Basic Board for Arduino. (Remarque : Retirez le module Bluetooth et coupez votre batterie ou débranchez votre adaptateur secteur lorsque vous téléchargez le code d’esquisse sur OSOYOO Basic Board for Arduino.)
Étape 4 : Remplacez la valeur par défaut 90 de la ligne 19 par la valeur FRONT de la leçon 1. Si vous alignez la direction de la roue via l’option 1 de l’étape 5, veuillez ignorer cette étape.
#define FRONT 90 //degree when steering facing straight forward
Étape 5 : Choisissez la carte / port correspondant à votre projet, téléchargez l’esquisse sur le tableau.
Étape 6 : Installez APP dans votre téléphone mobile :
1) Installez APP sur un appareil Android comme suit
Dans Google Play Store, recherchez le nom de l’application « OSOYOO imitation driving », téléchargez l’application comme suit et installez-la sur votre smartphone
Si vous ne pouvez pas utiliser Google Play pour trouver l’application, veuillez télécharger l’application à partir du lien suivant : https://osoyoo.com/test/mockdrive.apk.
2) Installez APP sur un appareil Apple IOS comme suit
Dans Apple APP store recherche APP nom « OSOYOO imitation driving », téléchargez l’APP comme suit et installez-la sur votre smartphone
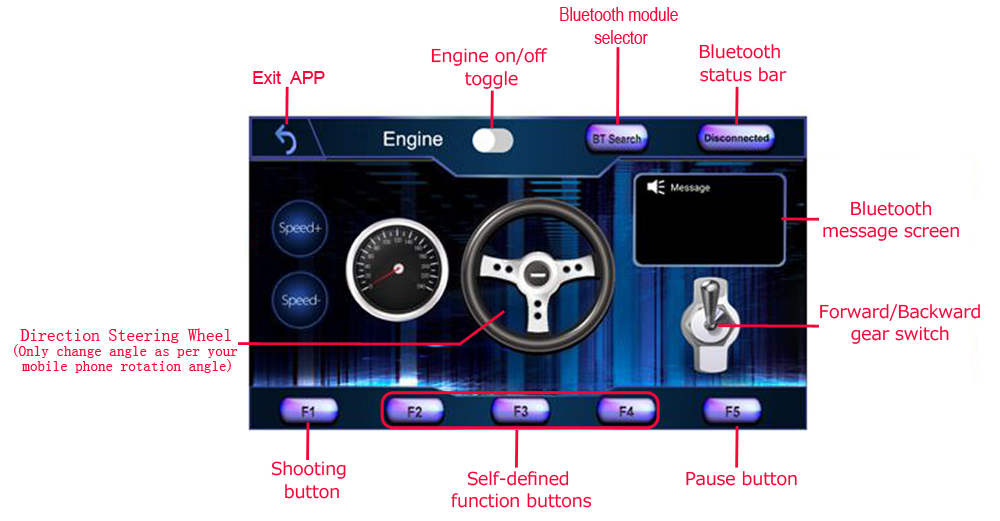
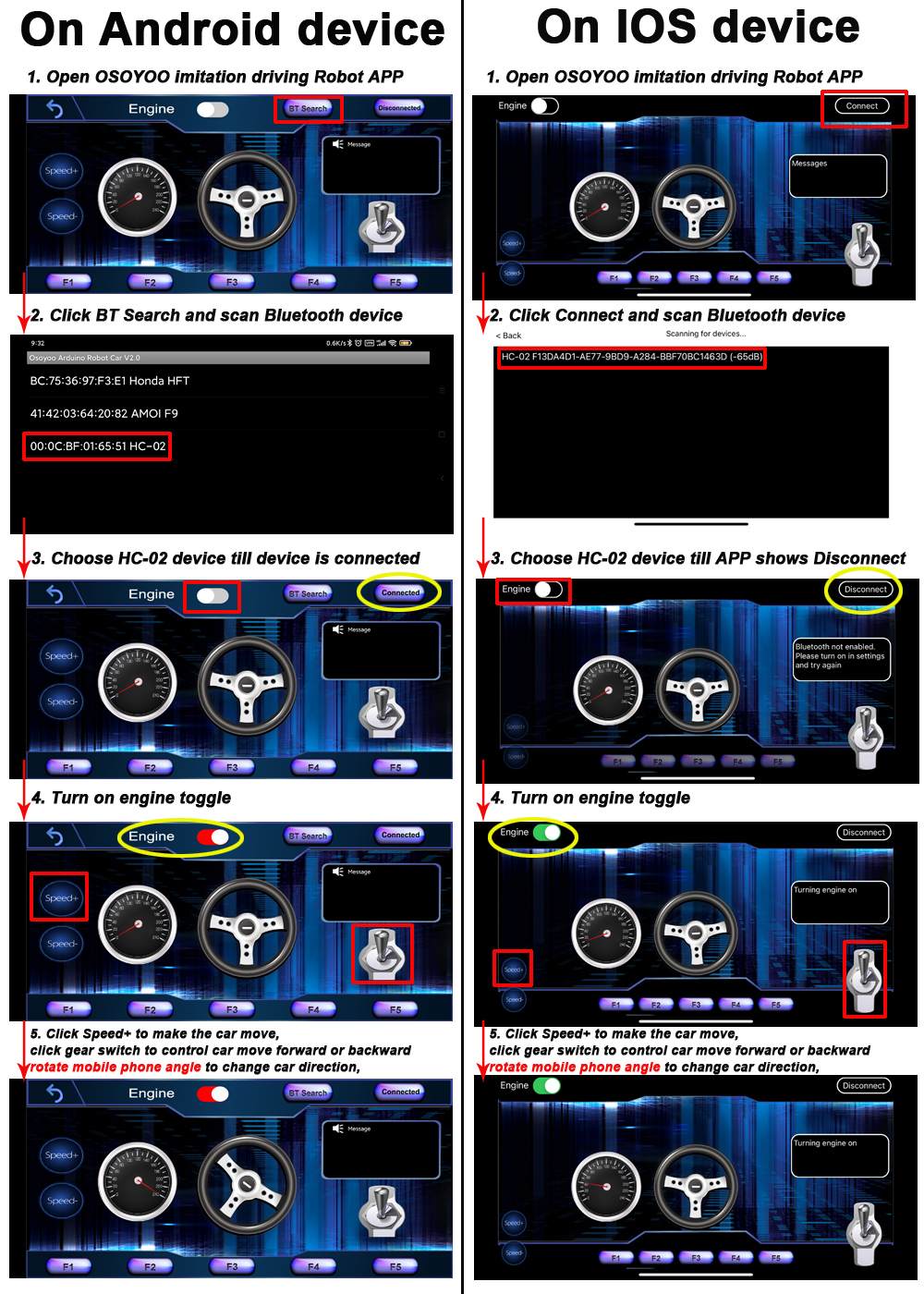
Explication de l’interface utilisateur de l’application (l’interface utilisateur est différente entre Android et iOS)
Connectez HC-02 Bluetooth dans un téléphone Android. Il y a un bouton de recherche BT dans Android APP : Lorsque vous cliquez sur ce bouton, vous verrez une liste de périphériques Bluetooth qui a été couplée avec votre APP. Sélectionnez le périphérique HC-02 pour connecter la voiture. Une fois le HC-02 connecté, l’état Bluetooth passe de Déconnecté à Connecté. Vous ne pouvez contrôler votre voiture que lorsque Bluetooth est connecté.
Connectez HC-02 Bluetooth dans iPhone / iPad, cliquez simplement sur le bouton Connecter, un appareil HC-02 apparaîtra dans une liste contextuelle. Cliquez sur le fait que l’appareil HC-02 connectera un module Bluetooth à votre iPhone. Ensuite, le bouton « Connecter » changera de nom en « Déconnecter ».
Bascule du moteur : Lorsque la bascule du moteur est réglée sur OFF (blanc), la voiture s’arrête et tous les boutons de l’APP sont désactivés. Lorsque la bascule du moteur est activée (rouge), la voiture commence à bouger. Tous les autres boutons de contrôle de mouvement s’activeront.
Interrupteur de vitesse avant/arrière : Ce commutateur de vitesse peut contrôler que la voiture avance ou recule comme un véritable engrenage de voiture.
F1, F2, F3, F4, F5 bouton personnalisé. Dans cette leçon, nous n’utilisons que F5 qui met en pause le mouvement de la voiture. La différence entre F5 et le bouton Engine OFF est que le bouton Engine OFF lorsqu’il est touché, tous les autres boutons seront désactivés. Vous devez basculer à nouveau le bouton Moteur pour activer l’autre bouton. D’autre part, lorsque F5 est cliqué, la voiture s’arrête, mais tous les autres boutons sont toujours actifs. Même si vous ne touchez à aucun bouton, changez simplement la position de l’angle de votre téléphone portable (comme si vous déplaciez le volant), la voiture bougera à nouveau.
Direction du volant : Lorsque vous faites pivoter l’angle de votre téléphone portable, le volant change d’angle en fonction de l’angle de rotation de votre téléphone portable. Cela fera changer de direction votre voiture. Par exemple, lorsque le volant tourne dans le sens des aiguilles d’une montre, la voiture se déplace vers la gauche. N’oubliez pas que la direction et le rapport avant / arrière doivent fonctionner ensemble de la même manière que vous conduisez une vraie voiture. Par exemple, lorsque vous souhaitez reculer votre voiture sur un terrain d’emballage du côté droit, vous devez régler la vitesse sur la position R et faire pivoter votre direction dans le sens des aiguilles d’une montre.
Vitesse+ : Faites accélérer la voiture robot
Vitesse- : Faites ralentir la voiture robot
Connecter APP au module Bluetooth HC-02
Se connecter avec un appareil Android :
Si vous utilisez un appareil Android et que vous n’avez pas jumelé un module Bluetooth avec votre téléphone portable, veuillez d’abord coupler le module Bluetooth avant d’ouvrir l’application. Dans le réglage → Bluetooth de votre téléphone portable, recherchez un périphérique Bluetooth appelé HC02, associez-le avec le mot de passe 1234. Une fois le périphérique Bluetooth HC02 couplé, ouvrez l’application. Cliquez sur le bouton de recherche BT pour connecter APP au périphérique HC02.
Se connecter avec un appareil iOS : Si vous utilisez un appareil iOS, ouvrez simplement l’application, cliquez sur le bouton Connecter, vous verrez une liste Bluetooth, sélectionnez le périphérique HC02.
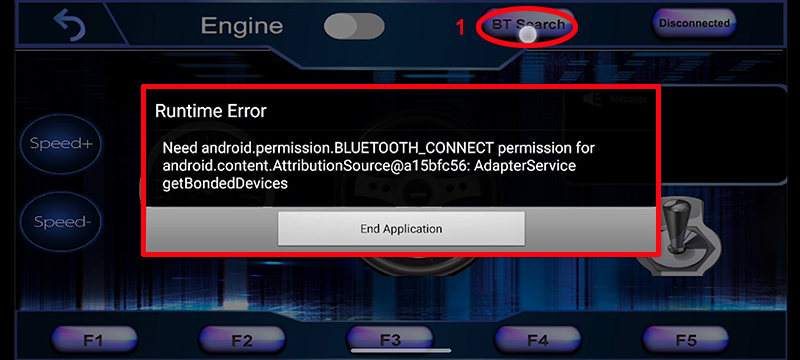
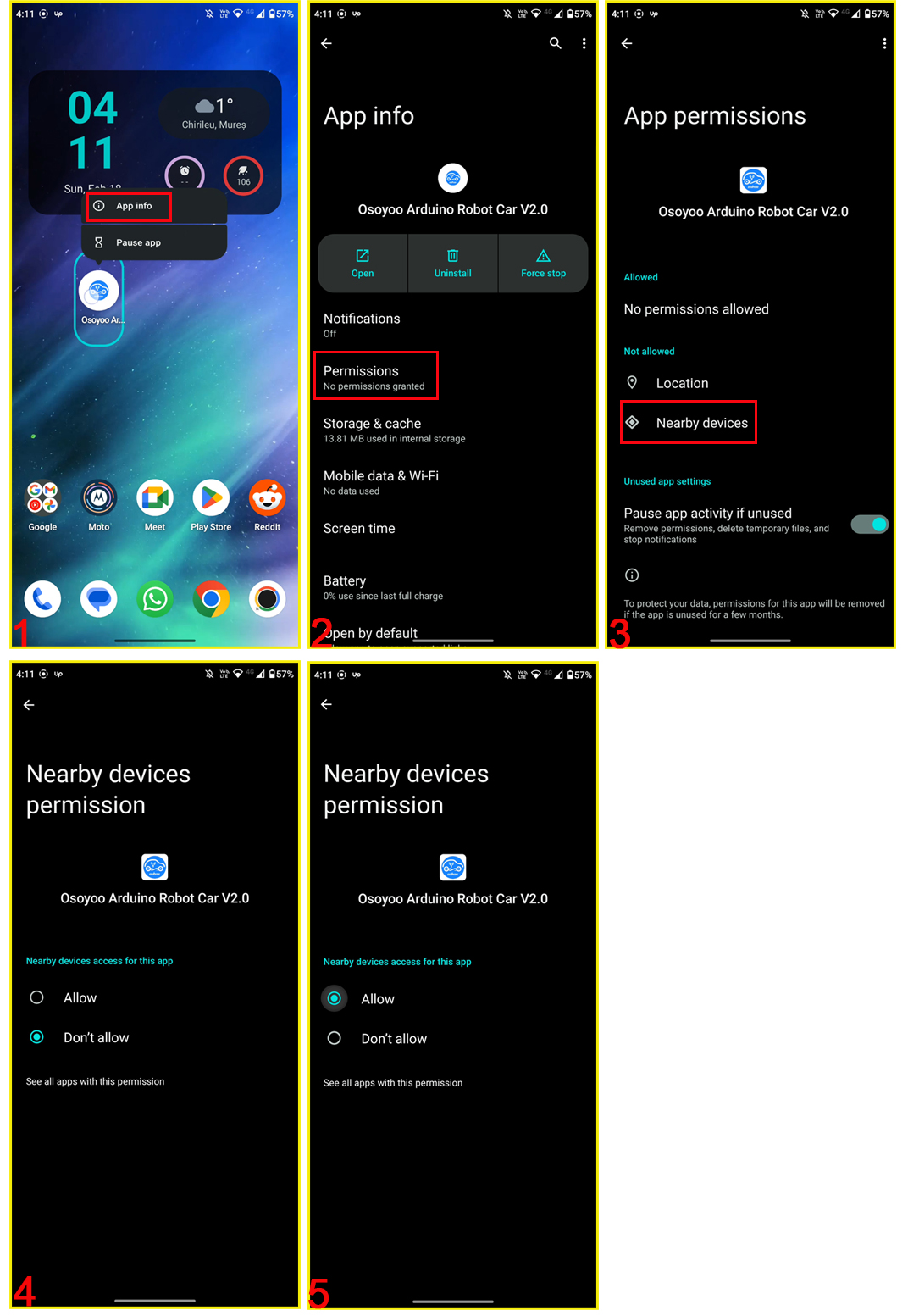
Remarque : Pour les appareils Android, lorsque vous cliquez sur le bouton de recherche BT et que vous obtenez la fenêtre d’erreur suivante, veuillez suivre les étapes suivantes :
Appuyez longuement sur l’APP inco, puis cliquez sur « APP info »
Maintenant que vous avez installé votre matériel et vos logiciels pour cette leçon, conduisons notre voiture !
Étape 1) Placez votre voiture robot sur le sol et allumez l’interrupteur de batterie.
Étape 2) Accédez à votre téléphone mobile →Réglage →paramètre Bluetooth et recherchez un périphérique Bluetooth appelé HC-02, associez-le avec le code 1234
Étape 3) Ouvrez OSOYOO imitation conduite Robot APP, cliquez sur le bouton BT Search et trouvez le Bluetooth que vous avez jumelé
Étape 4) Activez la bascule Moteur, cliquez sur Vitesse + pour faire accélérer le robot, car la voiture robot est très lente au début. Lorsque vous faites pivoter l’angle de votre téléphone portable, votre voiture change de direction.